
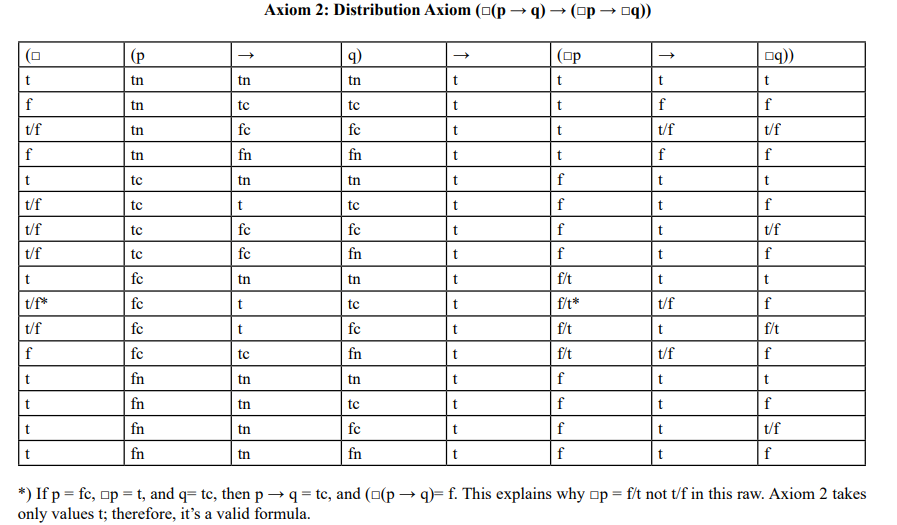
Journal of Current Trends in Computer Science Research(JCTCSR)
ISSN: 2836-8495 | DOI: 10.33140/JCTCSR
Impact Factor: 0.9



Research Article - (2025) Volume 4, Issue 6
Matrix Modal Logics with Indeterminate Truth Values
Received Date: Oct 02, 2025 / Accepted Date: Oct 28, 2025 / Published Date: Nov 04, 2025
Copyright: ©Â©2025 Andrey Kuznetsov. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Kuznetsov, A. (2025). Matrix Modal Logics with Indeterminate Truth Values. J Curr Trends Comp Sci Res, 4(6), 01-21.
Abstract
This paper introduces non-relational Resolution Matrix Semantics (RMS) as an alternative framework for constructing systems of modal logic. The concept of non-relational semantics for modal logic, initially suggested by J. Kearns [1981] and later developed in various ways by different researchers serves as a foundational inspiration for this approach [1-5]. Y. Ivlev suggested defining modal operators based on informal reasoning tailored to their area of applicability—such as epistemology, ethics, or physics—rather than formal relational structures, introducing the notion of an interpretation quasi-function that assigns truth values in a context- dependent manner. His modal systems, while lacking an obvious correspondence to Kripkean systems, offered an intriguing informal, substantive perspective that prioritized practical interpretation over abstract world-relations.
Introduction
This paper introduces non-relational Resolution Matrix Semantics (RMS) as an alternative framework for constructing systems of modal logic. The concept of non-relational semantics for modal logic, initially suggested by J. Kearns [1981] and later developed in various ways by different researchers serves as a foundational inspiration for this approach [1-5]. Y. Ivlev suggested defining modal operators based on informal reasoning tailored to their area of applicability—such as epistemology, ethics, or physics—rather than formal relational structures, introducing the notion of an interpretation quasi-function that assigns truth values in a context- dependent manner. His modal systems, while lacking an obvious correspondence to Kripkean systems, offered an intriguing informal, substantive perspective that prioritized practical interpretation over abstract world-relations.
Building on this idea, we develop RMS using an augmented 4-valued structure—necessary truth (tn), contingent truth (tc), contingent false (fc), and necessary false (fn)—augmented by indeterminate truth values t (either tn or tc), f (either fc or fn), and t/f (fully indeterminate). The general approach to constructing a modal system with RMS involves defining an interpretation function that assigns both determinate truth values (tn, tc, fc, fn) and indeterminate truth values (t, f, or t/f) to formulas.
A formula is valid in RMS if and only if it takes tn or t (t is indeterminate truth value) under all truth value assignments of its variables, providing a substantive, truth-value-based semantics distinct from Kripke’s relational models.
The most compelling question driving this work is how reframing Kripkean modal logics—such as K, KD, KT, KT4 (S4), and KT45 (S5)—within RMS illuminates new perspectives in both their construction and application. We build analogues of these systems, termed Km, KDm, KTm, S4m, and S5m, to explore how a truth-value-centric approach reveals alternative insights into modal reasoning, potentially enhancing its utility across diverse domains. Based on RMS, we propose a tableau (truth tree) method tailored for validating formulas, leveraging the finite set of truth values to systematically test for validity by exploring whether a formula can take invalid values. This method adapts the classical propositional logic tableau approach to modal contexts, enhancing its practicality for RMS-based systems. Furthermore, RMS opens avenues for advanced implementations in modal logic. RMS can support applications in deontic logic (modeling obligation and permission), epistemic logic (representing knowledge and belief), and other domains such as philosophy, technology, and science, where indeterminate or context- dependent truth values are prevalent.
From Kripkes Worlds to Truth Value Semantics
Kripkean modal systems, developed by Saul Kripke [1963], provide a standard framework for modal logic using relational semantics [6]. These systems are based on a structure known as a Kripke frame, defined as a pair (W, R), where W is a non-empty set of possible worlds and R is a subset of W × W, an accessibility relation between worlds. A Kripke model extends this frame to a triple (W, R, V), where V is a valuation function assigning truth values (true or false) to propositional variables at each world.
In this semantics, modal operators 
(necessity) and
(possibility) are interpreted as follows:
• P is true at a world w in W if and only if P is true in all worlds v in W such that wRv (i.e., v is accessible from w).
• P is true at w if and only if there exists at least one world v such that wRv and P is true at v.
The properties of R (e.g., reflexivity, transitivity, symmetry) determine the specific modal system, such as S4 or S5. Kripkean models excel due to their reliance on relational semantics, which is particularly powerful when applied to scientific, philosophical, or other aspects of reality that involve relations. For example, in epistemology, the accessibility relation can represent epistemic accessibility, where one world is accessible from another if and only if it is consistent with an agent’s knowledge. In physics, it might model causal relationships between events across possible worlds, such as in discussions of determinism or quantum mechanics. In ethics, it can reflect deontic relations, where worlds are accessible based on what is permissible under certain moral constraints. These relational structures allow Kripkean semantics to flexibly capture dependencies and interactions across contexts.
However, in some cases, a truth value approach like RMS can be more applicable and productive than a relational one. For instance, in decision theory, assigning truth values directly to propositions about outcomes (e.g., "this choice is necessarily beneficial" or "this outcome is contingently true") might simplify modeling without requiring an explicit relational structure. Similarly, in artificial intelligence, where systems often process propositions with graded or uncertain truth (e.g., "this sensor reading is likely true"), a truth value-based system can streamline computations over a relational framework. Since RMS works with truth values directly, Kripkean modal logics can potentially be generalized within RMS to incorporate infinite truth values, akin to fuzzy logic, where truth is a continuum rather than a binary or finite set.
Moreover, this shift to truth values in RMS opens the door to exploring modal logics with truth value gaps (where a proposition may lack a truth value) and gluts (where a proposition may be both true and false). Notable works in this area include Kleene’s three- valued logic [1952], which introduces an "undefined" value, and Priest’s paraconsistent logic [1979], such as his Logic of Paradox (LP), which allows for truth value gluts to handle contradictions [7,8]. These systems are particularly relevant in contexts like vague predicates (e.g., "this heap is large") or paradoxical statements (e.g., the liar paradox), where traditional binary or relational semantics may falter. Some paraconsistent logics based on the RMS (quasi-matrix) method were constructed within deontic logic (Kuznetsov, A., 2004) [9]. A similar approach can be applied to the modal logics described in this paper.
The RMS approach is also interesting in its own right because it inspires consideration of "indeterminate" truth values, such as "necessary truth or contingent truth" (t) or even "fully indeterminate truth value" (t/f). These values may alternatively be termed “superposed” or “quantum” truth values (qu-values), by analogy with the “qubit” in quantum computing. These concepts allow us to model situations where precision is elusive yet modal distinctions remain relevant. We encounter a scenario where the precise value is indeterminate yet constrained within a specific domain. This does not violate the concept of a function, as it consistently selects a single value from its range (for example, truth value t - "either tn or tc") for each input, albeit one that "wanders" between tn and tc. Such situations arise across various domains. In quantum mechanics, for instance, the state of a particle’s spin might be necessarily true (tn) in a deterministic context or contingently true (tc) due to superposition until measurement, yet always one or the other. In artificial intelligence, a decision-making algorithm assessing sensor data (e.g., "the obstacle is ahead") might assign tn when corroborated by multiple sources or tc based on partial evidence, with the truth value fixed per instance but varying by case. Similarly, in legal reasoning, a statute’s applicability could be necessarily true under clear precedent (tn) or contingently true in ambiguous cases (tc), reflecting context-dependent certainty within a bounded range. These examples illustrate how such fuzzy yet singular truth assignments model real-world phenomena where precision is elusive but categorical limits apply, aligning with the substantive semantics proposed by RMS.
For a more detailed exploration of RMS, which builds on these ideas by shifting focus from relations to a substantive truth value framework, we turn to the next section.
Intuitive Justification for Matrix Definitions of Negation and Implication Using Countable Sequences of Truth Values
In this chapter, we explore an intuitive foundation for the matrix definitions of negation (¬) and disjunction (v) in RMS semantics by imagining truth values as countable sequences. These sequences reflect the truth of a proposition across an ordered set of possible worlds, where the first element represents "our world" (the actual world), and the subsequent elements form a countable sequence of worlds reachable from it. This perspective offers a way to justify the matrix definitions without relying on relational Kripkean semantics, instead grounding them in a substantive, truth value- based framework. We define the four core truth values—necessary truth (tn), contingent truth (tc), contingent false (fc), and necessary false (fn)—as sequences, then use this model to shed light on how negation and disjunction behave, particularly highlighting cases where disjunction yields the indeterminate value "t" (either tn or tc).
Truth Values as Countable Sequences
Imagine each truth value as an infinite sequence of binary values (t for true, f for false), indexed by worlds: w0 (our world), w1, w2, ..., w3, ..., where wn is the actual world and w1, w2, ... are worlds accessible from it in some ordered way. In these sequences, t and f are values understood in a classical bivalent logic manner, representing straightforward true or false assignments at each world.
We can define our four truth values intuitively as follows:
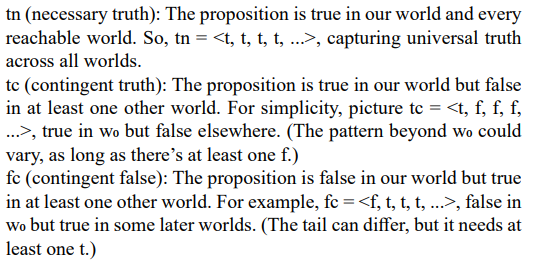

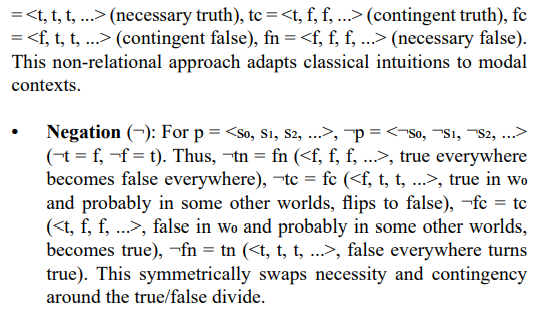
Table 3.2a: Negation
|
p |
¬p |
|
tn |
fn |
|
tc |
fc |
|
fc |
tc |
|
fn |
tn |
<img src=" https://www.opastpublishers.com/scholarly-images/9861-6911c7fe1099d-matrix-modal-logics-with-indeterminate-truth-values.png" width="500" height="600">
fn ∨ fn = fn
Indeterminacy (e.g., tc ∨ tc = t) reflects variable world overlaps.
Table 3.2b: Disjunction
|
p ∨ q |
tn |
tc |
fc |
fn |
|
tn |
tn |
tn |
tn |
tn |
|
tc |
tn |
t |
t* |
tc |
|
fc |
tn |
t* |
fc |
fc |
|
fn |
tn |
tc |
fc |
fn |
*) If q = ¬p, then p ∨ q = tn (no tc). This follows from sequence representations of p and ¬p
Resolution Matrix Semantics (RMS) for Modal Systems
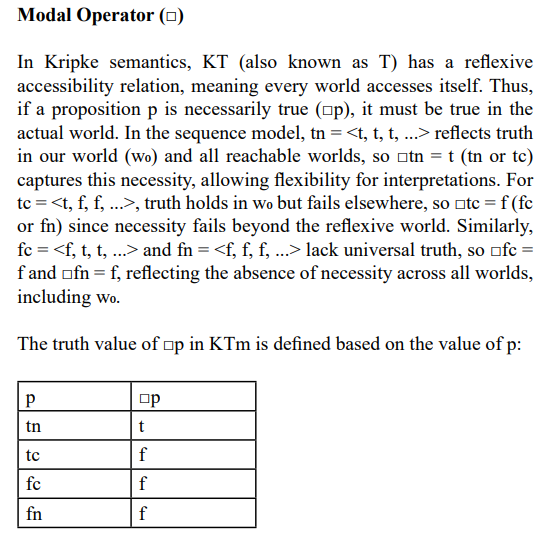
In RMS, we use four truth values: tn, tc, fc, and fn, along with indeterminate truth values, t, f, or t/f. Now, we introduce a system equivalent to the Kripkean system KT, called KTm ("m" for matrix), based on RMS.
System KTm
Language:
Propositional variables: p, q, etc., representing basic propositions. Standard logical connectives: ¬ (negation), ∧ (conjunction), ∨ (disjunction), and → (implication). The modal operator , representing necessity.
Brackets: (and), used to group expressions and clarify the structure of formulas.
Definition of a Well-formed Formula
The set of well-formed formulas in KTm is defined recursively as follows: Basic propositions p, q are formulas.
If p and q are formulas, then the following are also formulas: ¬p, p ∧ q, p ∨ q, p → q. If p is a formula, then p is a formula.
These rules generate all permissible formulas in KTm, allowing us to express both propositional and modal statements within the system.
Next, we define KTm’s RMS using ¬ and → as primitives, with the truth values tn, tc, fc, and fn:
Negation (¬)
The truth value of ¬p is determinate by reversing the order of the four truth values:
|
p |
¬p |
|
tn |
fn |
|
tc |
fc |
|
fc |
tc |
|
fn |
tn |
Implication (→)
The definition of implication (p → q) in KTm can be formulated similarly to the definition of disjunction in Section 3.3, depending on the truth values of sequences for p and q across worlds. The results are presented in the table below.
|
p → q |
tn |
tc |
fc |
fn |
|
tn |
tn |
tc |
fc |
fn |
|
tc |
tn |
t* |
fc |
fc |
|
fc |
tn |
t |
t* |
tc |
|
fn |
tn |
tn |
tn |
tn |
*) if p = q then tn (not tc)
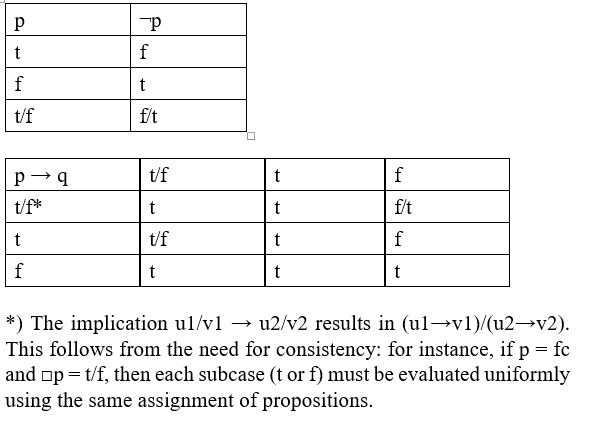
The definitions for negation and implication involving indeterminate and mixed (determinate and indeterminate) truth values can be derived from the implication table for determinate values provided above. Simply apply all corresponding columns for an indeterminate truth value (e.g., tn and tc for t). The resulting tables for indeterminate values t and f are the same as in classical bivalent logic.
|
p |
¬p |
|
t |
f |
|
f |
t |
|
p → q |
t |
f |
|
t |
t |
f |
|
f |
t |
t |
Here, "t" and "f" do not represent the values of classical two-valued logic; instead, they are indeterminate truth values. "t" stands for "either tn or tc," while "f" stands for "either fc or fn."
Let A be a formula in the system under consideration, and let I denote an interpretation function that assigns truth values to formulas. The possible truth values are drawn from the set {tn, tc, fc, fn, t, f, t/f}, where t is "either tn or tc", f is "either fc or fn", and t/f stands for “either tn or tc or fc or fn”.
The formula A is valid in the interpretation I if and only if it takes a determinate truth value tn or indeterminate truth value t under all truth value assignments of its variables (propositions).
KTm (Kripkean System KT based on RMS semantics)
The system KTm is defined with the following axioms and inference rules:
Axioms
These axioms and rules define the syntactic structure of KTm, which we will analyze in terms of its RMS properties in the following sections.
Soundness Theorem The system KTm is sound—for all theorem A in KTm, A is a valid formula in RMS.
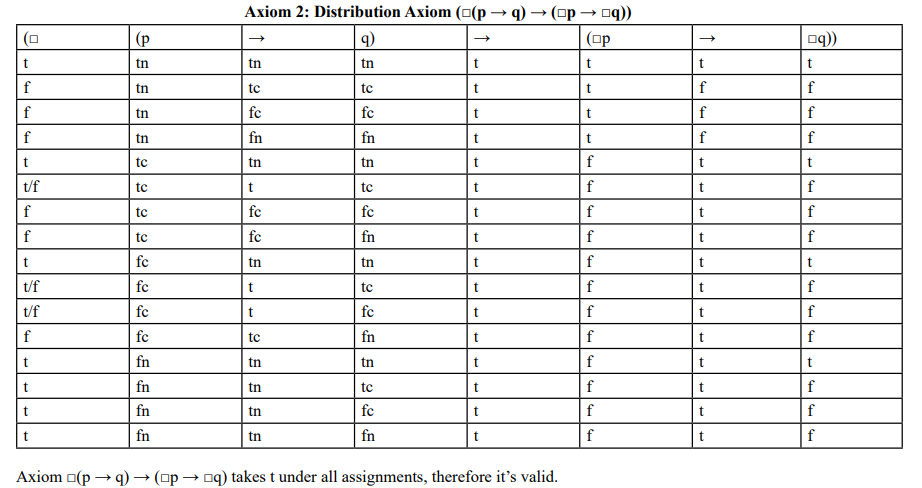
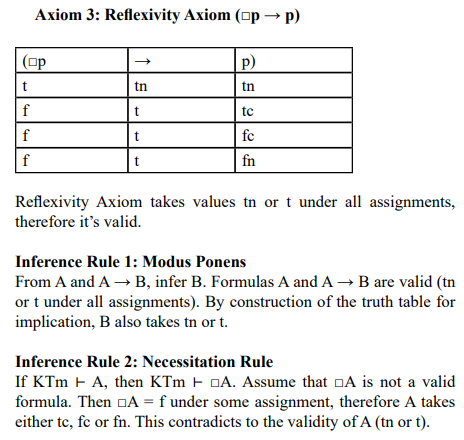
To establish this, we must show that each axiom of KTm is valid (i.e., takes only tn or t for all possible assignments of its propositional variables) and that the inference rules preserve validity.
Axiom 1: Propositional Tautologies
Consider a simple tautology, such as p ∨ ¬p. In all cases, the value is tn, in accordance with implication table. Every tautology can be represented in a conjunctive normal form, each elementary disjunction of which, like p ∨ ¬p, takes only tn. Thus, every propositional tautology would have tn. Therefore, propositional tautologies are valid.
It should be noted that the definition of validity for the formulas requires to have either the determinate value tn, or indeterminate value t under all assignments of its variables. If formula A takes a determinate values tc or fc or fn, or indeterminate value f under some assignment of its variables, then A is not valid.
Completeness Theorem
KTm is complete—for all valid formula A, KTm![]() A—using maximal consistent sets.
A—using maximal consistent sets.
System KT4m: Reflexive and Transitive Logic
KT4m aligns with Kripke’s S4 (reflexive and transitive accessibility).
In Kripke semantics, KT4 (akin to S4) has a reflexive and transitive
Rules: Modus Ponens, Necessitation.
Soundness Theorem: All theorems of KT4m are valid.
Proof:
• Axiom 1: Tautologies valid (see KTm).
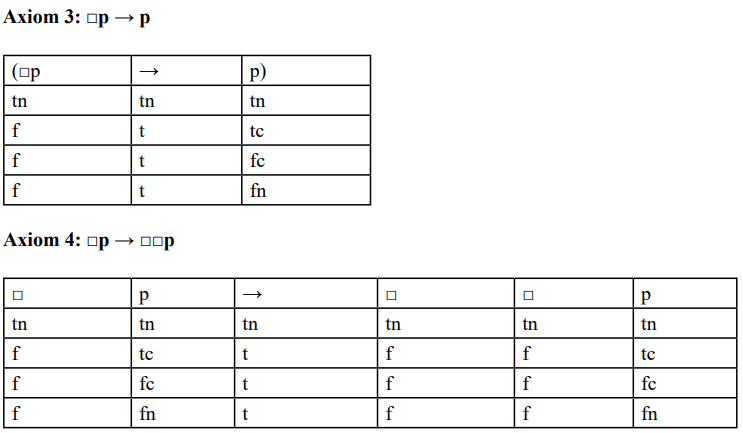
Axiom 4 takes tn or t, therefore it’s valid
Rules: Same as KTm.
Completeness Theorem: Every valid formula in RMS for KT4m is provable.
• Proof for Lemma 1 and Lemma 2: Similar as for KTm.
• Conclusion: System KT4m is complete.
System S5m: Reflexive, Transitive, and Symmetric Logic
S5m matches Kripke’s S5 (full accessibility).
In Kripke semantics, S5 is characterized by a reflexive, transitive, and symmetric (equivalence) relation, ensuring all worlds are
Axioms:
1. Propositional Tautologies
• Rules: Modus Ponens, Necessitation.
Soundness Theorem: All theorems of S5m are valid.e.
Proof:
• Axiom 1: Tautologies valid (see KTm).
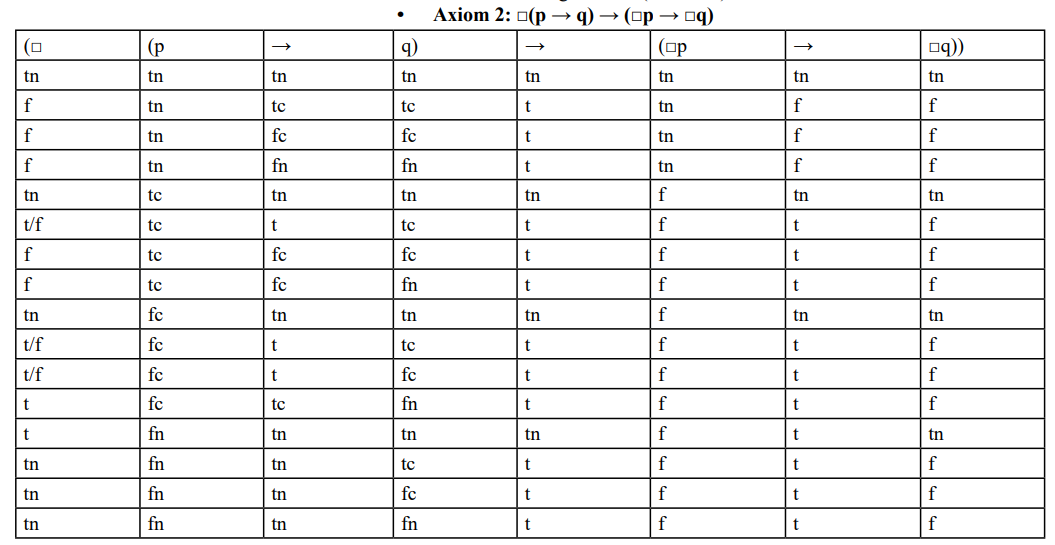
• Axiom 2: Proof similar to previous systems. Valid.

Axiom 5 takes only values tn, therefore, it’s a valid formula
• Rules: Same as KTm.
Completeness Theorem: Every valid formula in RMS for S5m is provable.
Proof for Lemma 1 and Lemma 2: the same as for KTm.
• Conclusion: Same as KTm
RMS Semantics for Non-Reflexive Modal Logics
Before delving into the specifics of the KDm system, it’s worth considering how Resolution Matrix Semantics (RMS) can be applied in the opposite direction from our previous explorations— toward modal systems weaker than KTm, where the Kripkean framework lacks reflexivity. In reflexive systems like KTm, the accessibility relation ensures that every world accesses itself, constraining the behavior of the modal operator and its truth values.
Our intuition suggests that relaxing this condition—moving to systems without reflexivity—should result in even broader, less determinate truth values for , reflecting greater semantic flexibility due to fewer structural restrictions. KDm, corresponding to Kripke’s KD system with seriality but no reflexivity, serves as a confirmation of this intuition.
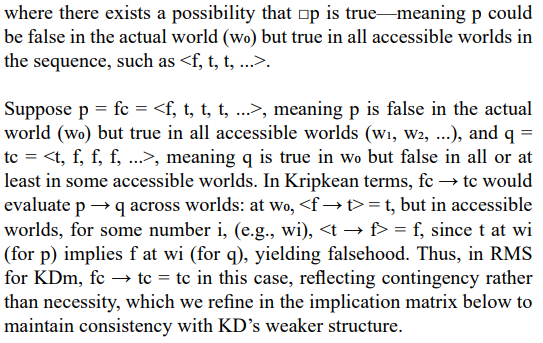
Here, we apply RMS semantics to analyze a non-reflexive logic, observing how the definition of the modal operator adapts to this weaker framework. KDm’s modal operator allows a broader range of indeterminate values than KTm. One case subtly restricts the implication matrix to align precisely with the system’s properties. For instance, when p = fc and q = tc, p → q yields tc instead of t (tn or tc). Similarly, when p = q = tc or p = q = fc, p → q results in tn rather than t (tn or tc).
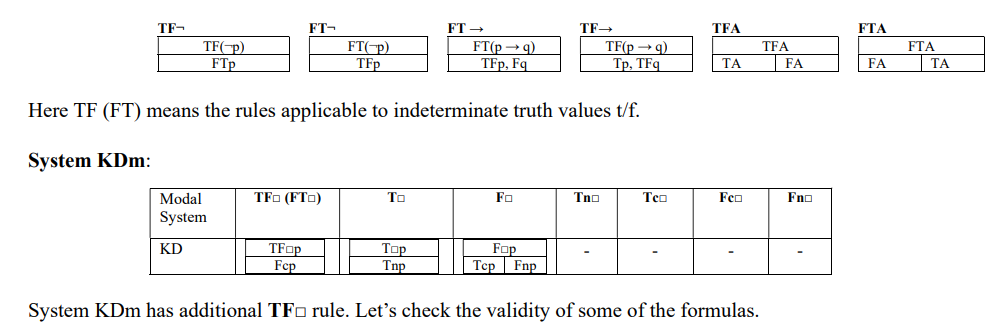
System KDm:
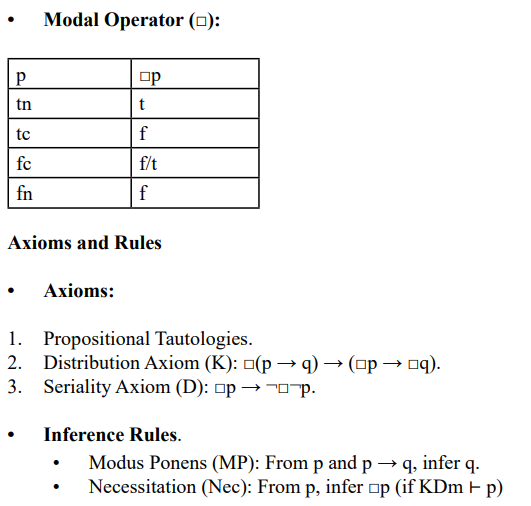
System KDm corresponds to Kripke’s KD system, featuring a serial accessibility relation (for every world w, there exists some v such that wRv). In RMS, KDm uses the same language and foundational semantics as KTm, with adjusted axioms and modal operator definitions. In the development of RMS semantics, system KDm stands out as the first system in this paper to incorporate the indeterminate truth value "t/f," which can resolve to any of the four values: tn, tc, fc, or fn (or their combinations). This indeterminacy arises specifically when p takes the value fc (contingent false),
Since KDm corresponds to Kripke’s KD system with a serial but non-reflexive accessibility relation, the lack of reflexivity allows p to be false in the actual world while still permittingp to hold if all subsequent worlds are true, rendering p’s truth value indeterminate in the general case and thus spanning the range {t, f}. This marks a significant departure from the more constrained modal operator definitions in reflexive systems like KTm, highlighting KDm’s greater semantic flexibility.
RMS Semantics for KDm Implication (→):
|
p → q |
tn |
tc |
fc |
fn |
|
tn |
tn |
tc |
fc |
fn |
|
tc |
tn |
t/tn* |
fc |
fc |
|
fc |
tn |
t/tc* |
t/tn* |
tc |
|
fn |
tn |
tn |
tn |
tn |
![]()
The definitions for negation and implication involving indeterminate and mixed (determinate and indeterminate) truth values can be derived from the implication table for determinate values provided above. Simply apply all corresponding columns for an indeterminate truth value (e.g., tn and tc for t).
Soundness Theorem
Theorem: KDm is sound—for every theorem A in KDm, A is valid in RMS.
Proof: We must show that all axioms are valid and the inference rules preserve validity.
• Axiom 1: Propositional Tautologies
All propositional axioms take tn. The proof is the same as in previous systems.
Axiom 1 is a valid formula.
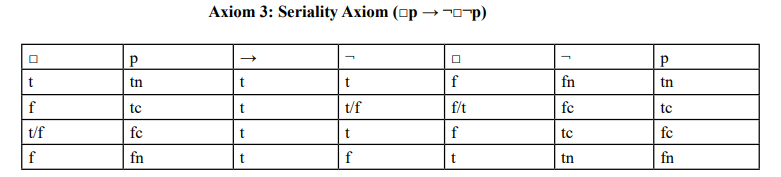
Axiom 3 is a valid formula.
• Inference Rule 1: Modus Ponens
Same as in previous systems.
• Inference Rule 2: Necessitation
Same as in previous systems.
Conclusion: All axioms and rules hold; KDm is sound.
Completeness Theorem
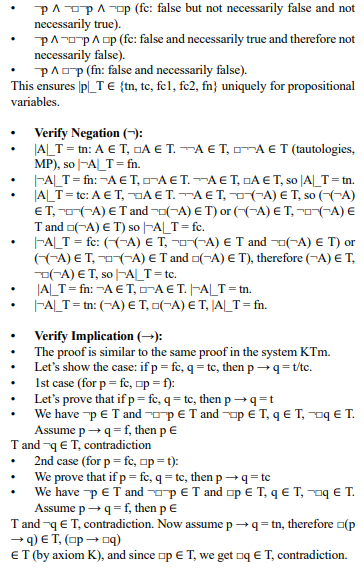
Theorem: KDm is complete—for every valid formula A in RMS, KDm â?¢ A. For the completeness proof, see Appendix B.
System Km (Minimal Logic)
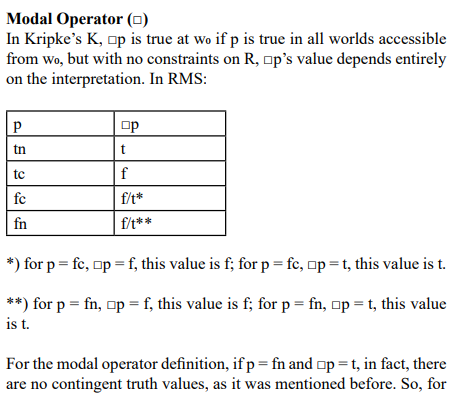
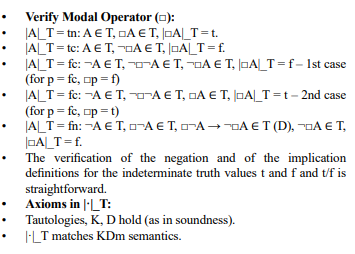
System Km corresponds to Kripke’s minimal modal system K, which imposes no constraints on the accessibility relation—no requirements such as seriality, reflexivity, transitivity, or symmetry apply. In Resolution Matrix Semantics (RMS), Km adopts the same language and foundational semantics as other systems (e.g., KTm, KDm), but its lack of relational restrictions results in a highly flexible modal operator definition. Unlike KDm, which introduces seriality and constrains fn to f, Km permits fn to take t/f - fully indeterminate values in certain cases, reflecting the absence of structural assumptions about accessible worlds.
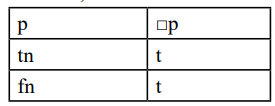
In the context of a single, non-reflexive world with no accessible worlds within System Km, any proposition p’s truth value is determinate solely by its value at w0. If p is false at w0, its truth value is fn (necessary false). However, the necessity operator p is true at w0 because p is considered true in all accessible worlds— vacuously true since there are none. Thus, the truth value of p is tn (necessary truth). This scenario illustrates that in System Km, for p with truth value fn, p can take the value t (either tn or tc), specifically tn in this case, aligning with the system’s definition where p = t/f for p = fn. This highlights the indeterminacy inherent in System Km, where the absence of constraints on the accessibility relation allows for such cases, and notably, both p and ¬p can be tn, reflecting the vacuous truth of necessity in isolated worlds.
RMS Semantics for Km
Km employs the same language as KDm.
Negation (¬)
The Negation matrix definition is the same as in KDm.
Implication (→)

this case, the definition for modal operator is as follows:
Axioms and Rules
Axioms:
1. Propositional Tautologies.
![]()
Inference Rules
1. Modus Ponens (MP)
2. Necessitation (Nec)
Km omits additional axioms like D, T, 4, or 5, making it the baseline modal system.
Soundness Theorem
Theorem: Km is sound—for every theorem A in Km, A is valid in RMS.
Proof: Show that all axioms are valid and inference rules preserve validity.
Axiom 1: Propositional Tautologies
The same way as in previous cases; tautologies take only tn.
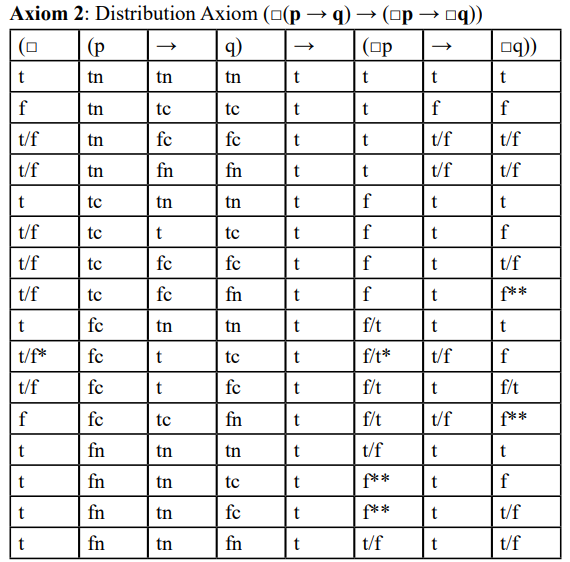
Axiom 2 is valid.
The proof for inference rules is the same as in previous systems.
Conclusion: All axioms and rules hold; Km is sound.
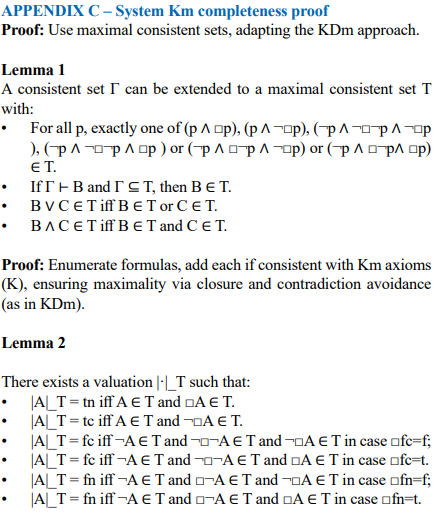
Completeness Theorem
Theorem: Km is complete—for every valid formula A in RMS,
Km![]()
A.
For completeness proof, see Appendix C.
Tableau Method for Resolution Matrix Semantics
The tableau method, a classical tool in propositional logic for testing validity, systematically decomposes formulas into their subformulas to determine if a contradiction arises under all possible truth assignments [2, 10]. In Resolution Matrix Semantics (RMS), we adapt this approach to modal contexts by leveraging the finite set of truth values—necessary truth (tn), contingent truth (tc), contingent false (fc), and necessary false (fn)—alongside indeterminate values (t, f, t/f). A formula A is valid in an RMS system if its negation ¬A cannot be assigned a "true" value (tn or t) in any interpretation, meaning every branch of the tableau closes (i.e., contains a contradiction). This section outlines the tableau method for RMS and provides examples for the system KTm, illustrating cases where a formula is a theorem (valid) and where it is not.
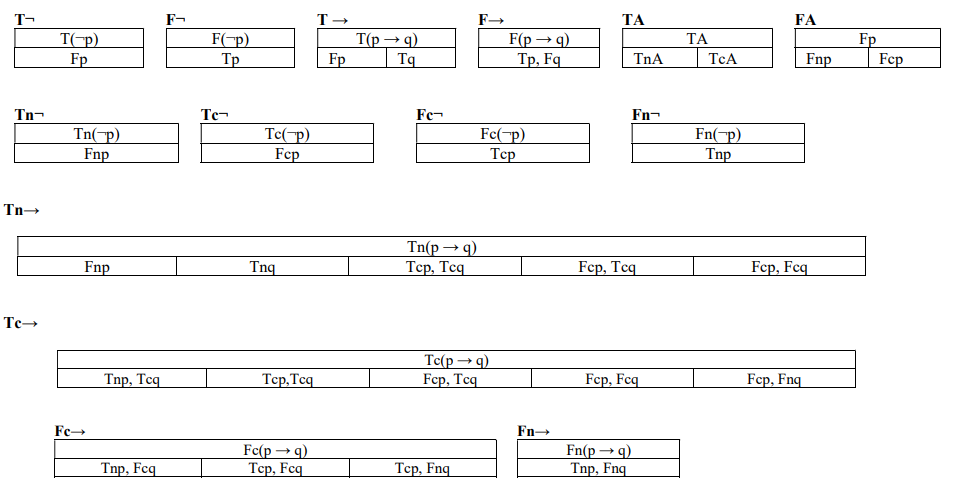
Tableau Rules in RMS
The following is the complete set of tableau rules for the KTm system. Each application of the tableau rules begins with the FA rule, followed by the application of all relevant rules to decompose the initial formula, continuing until either all branches close or at least one branch remains open.
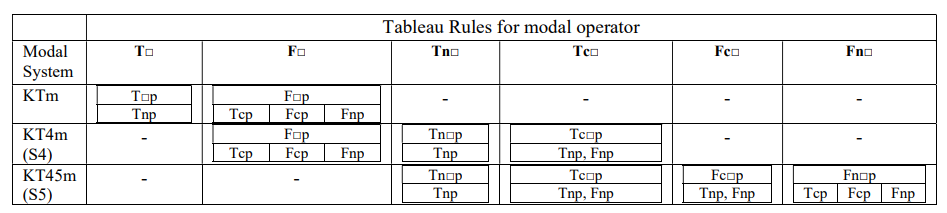
Tableau Rules for Modal Systems
First, we show the tableau rules for systems KTm, KT4m and KT45m considered in this paper. Rules for negation and implication are common for the considered modal systems.
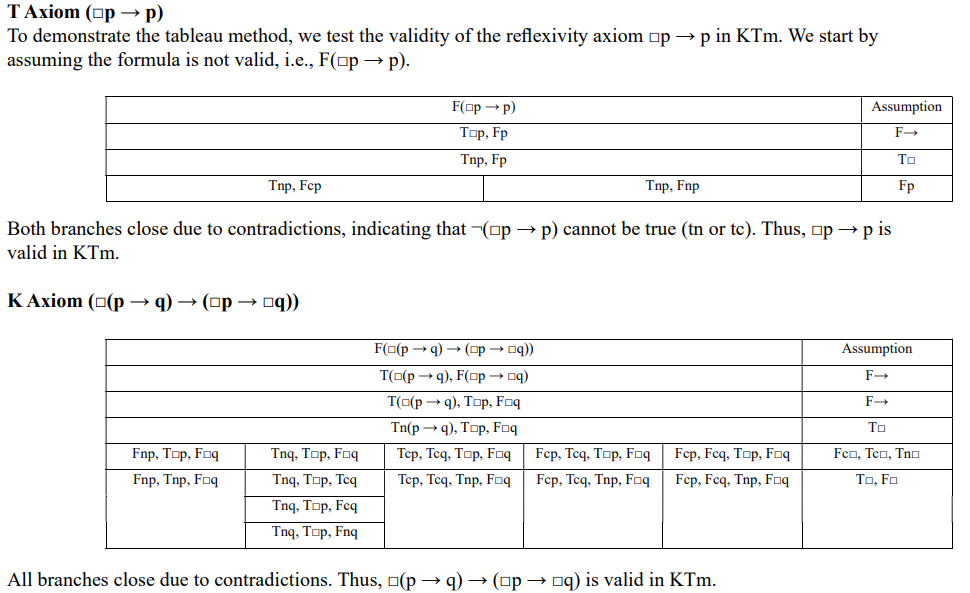
Examples
System KTm:
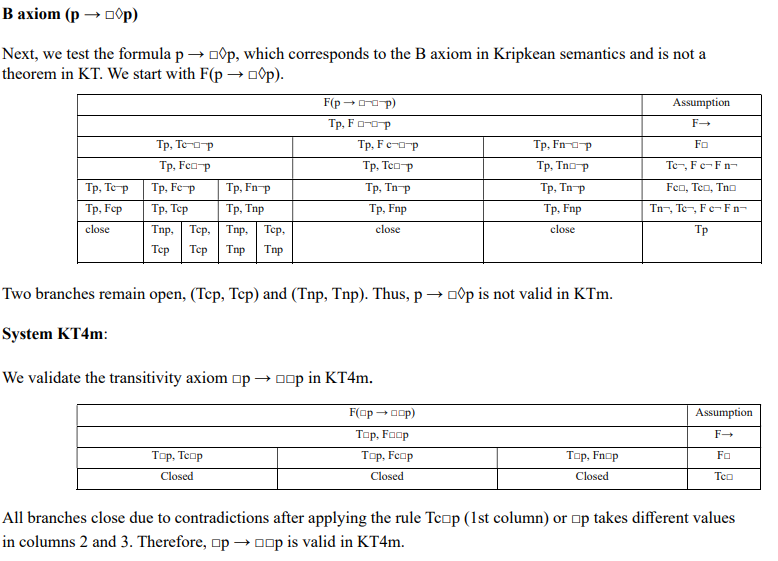
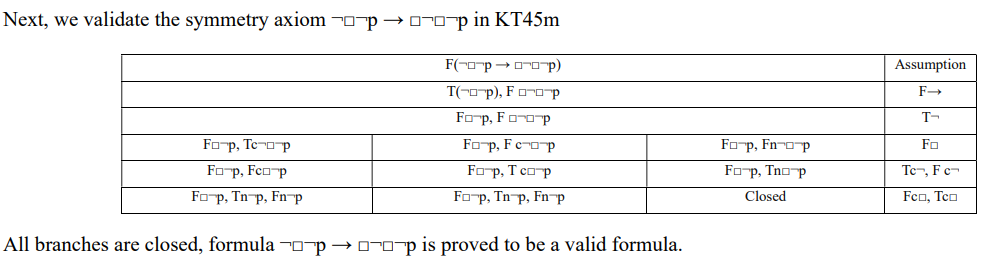
System KT45m:
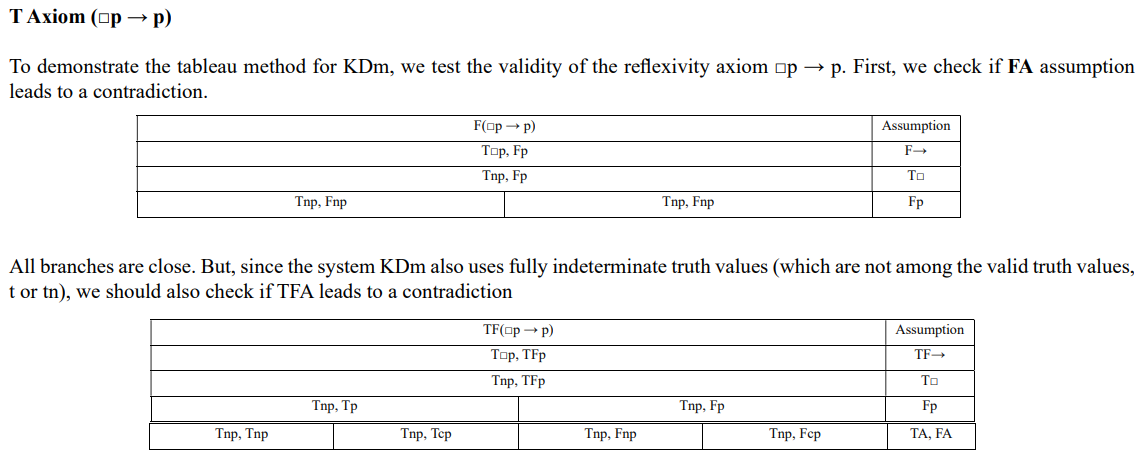
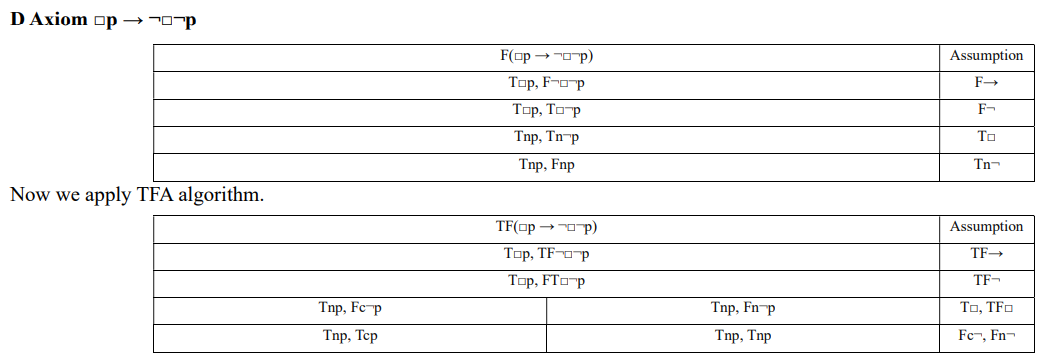
Now let’s examine systems KDm and Km. Both incorporate an additional truth value, t/f (“fully indeterminate”). As in previous systems, to determine if a formula A is valid, we apply the FA rule, which results in either all branches closing or at least one branch remaining open. Additionally, we must assume that formula A takes the fully indeterminate value t/f and apply all decomposition rules to check whether this assumption leads to a contradiction. Therefore, for systems KDm and Km, we use two algorithms: FA and TFA. For A to be valid, all branches in both tableau trees must close.
Below are the additional tableau tree rules for systems KDm and Km:
One of the branches, (Tnp, Tnp) remains open, therefore, axiom T can take the value t/f, this is not one of the values for the valid formula (t or tn), therefore this axiom is not valid in system KDm.
The branch is close. Both tableau algorithms lead to the closure in all branches, therefore, axiom D is valid in KDm.
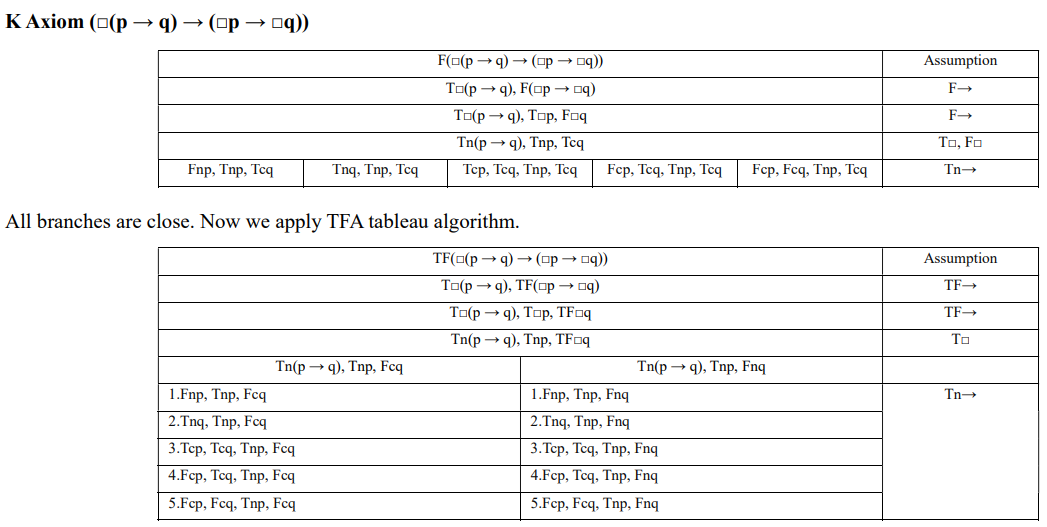
Now let’s check if K axiom is valid in system KDm.
This tableau tree also has all branches close; therefore, axiom K is valid in KDm.
System Km
Finally, we show some examples of tableau tree proofs for the system Km. Below are the special rules for system Km.
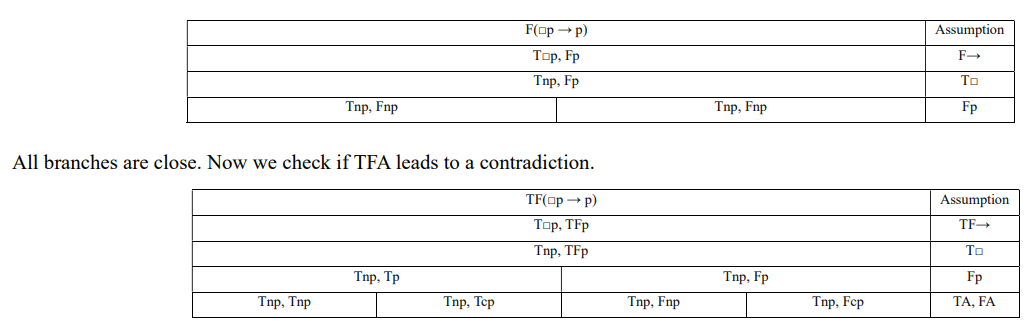
One of the branches, (Tnp, Tnp) is open, therefore, axiom T is not valid in system KDm.
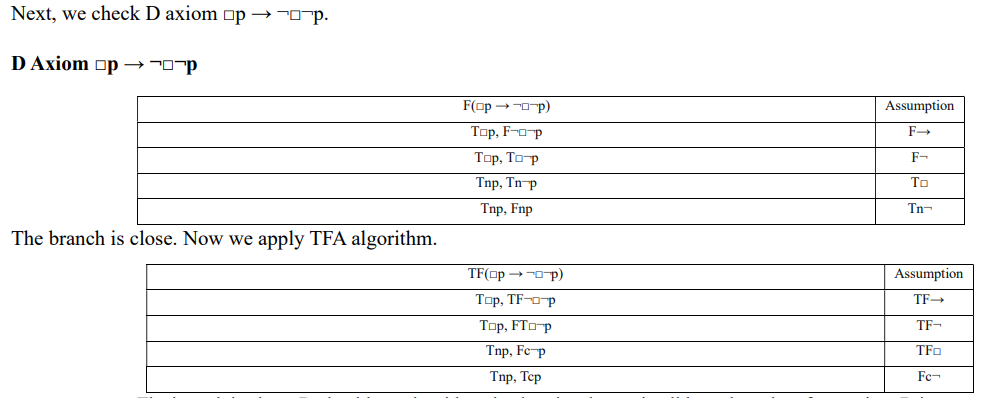
Next, we check D axiom in Km.
One of the branches remains open, therefore D axiom is not valid in Km.
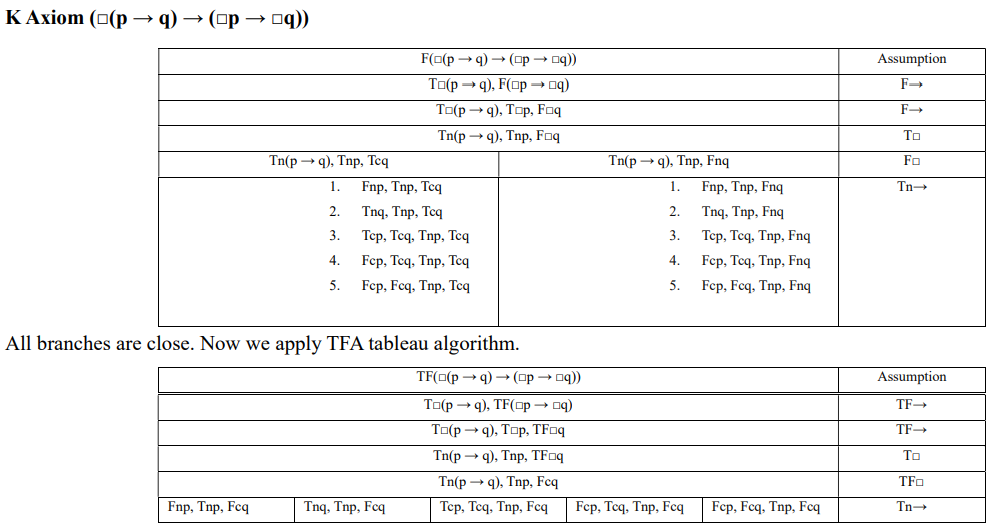
Now let’s check if K axiom is valid in system KDm.
All branches close; therefore, axiom K is valid in Km.
The tableau method in RMS efficiently tests validity by exploring truth value assignments, closing branches when contradictions arise. This adaptation enhances RMS’s practicality, as noted in the Introduction, offering a systematic alternative to Kripkean model- checking.
Relationship Between Modal Operator Truth Values and System Generality
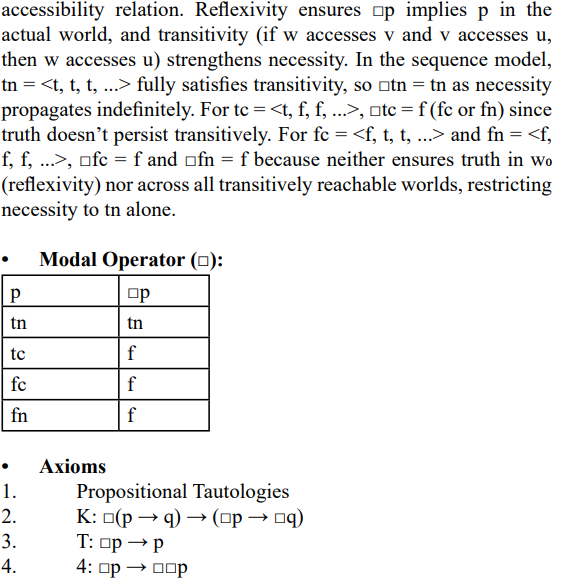
In this chapter, we examine the interplay between the axiomatic structure of modal systems Km, KDm, KTm, KT4m, and S5m and the truth values assigned to their modal operators () in Resolution Matrix Semantics (RMS). These systems constitute a hierarchy in which the axioms of Km form a subset of KDm, those of KDm a subset of KTm, those of KTm a subset of KT4m, and those of KT4m a subset of S5m, embodying a progressive refinement of their logical constraints.
The truth values assigned to exhibit a reverse pattern: the more general the system (with fewer axioms), the more indeterminate or vague its modal operator truth values, while the more specific systems (with more axioms) constrain these values progressively. This inverse relationship underscores a key insight of RMS: generality in axiomatic structure correlates with greater flexibility or ambiguity in semantic assignments. Here, we extend this analysis with philosophical reasoning on how the indeterminacy of in RMS mirrors the degree of restriction on the accessibility relation R in Kripkean semantics, particularly with the updated, stricter definition of for S5m, and explore its implications for philosophy and science.
Axiomatic Hierarchy
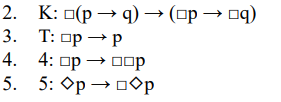
The systems Km, KDm, KTm, KT4m, and S5m correspond to the Kripkean systems K, KD, KT (T), KT4 (S4), and S5, respectively, with a clear progression in their axioms:
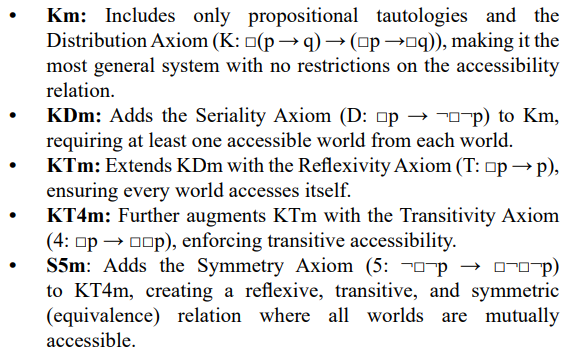
Thus, the set of axioms grows from Km to S5m (K ⊆ KD ⊆ KT ⊆ KT4 ⊆ S5), reflecting increasing constraints on the underlying Kripkean accessibility relation: none (Km), serial (KDm), reflexive (KTm), reflexive-transitive (KT4m), and reflexive-transitive- symmetric (S5m).
Modal Operator Truth Values. Inverse Relationship
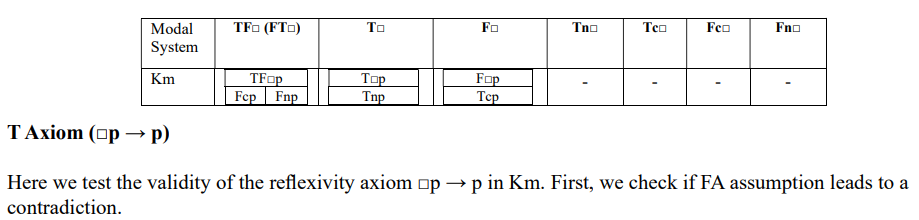
Let’s compare the truth value assignments for across the systems.
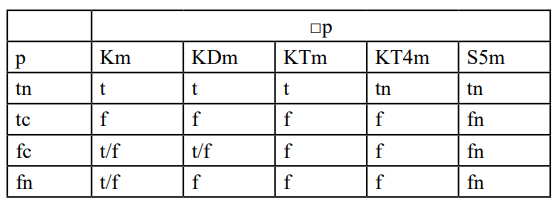
The progression of truth values reveals a clear pattern:
• Km has the most indeterminate values (t, f, t/f), with t/f for fc and fn, reflecting its lack of relational constraints.
• KDm narrows this slightly (t, f, t/f), with t/f only for fc, as seriality rules out fn = t.
• KTm reduces indeterminacy further (t, f), eliminating t/f entirely, as reflexivity fixes = f.
• KT4m constrains values to (tn, f), with tn = tn and all others f, reflecting the strong reflexivetransitive structure.
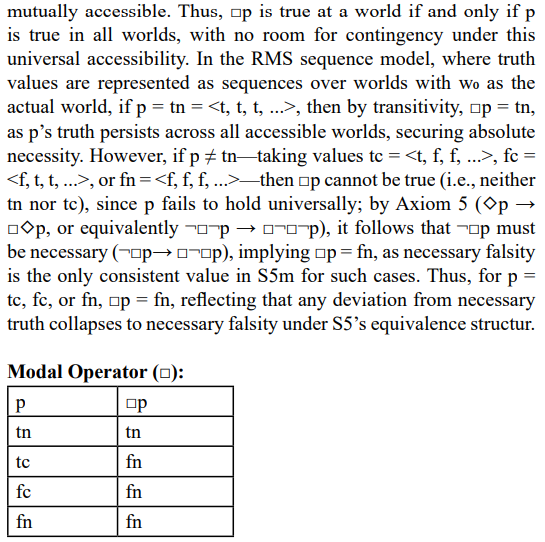
• S5m achieves maximal determinacy, allowing only tn or fn, as symmetry, reflexivity, and
• transitivity enforce a binary necessity/falsity distinction across all mutually accessible worlds.
The moral holds: the more general a system (fewer axioms), the vaguer its truth values in RMS, reflecting fewer restrictions on R in Kripkean semantics. Km’s maximal indeterminacy (t, f, t/f) mirrors an unrestricted R—a blank slate for interpretation. As axioms like seriality, reflexivity, transitivity, and symmetry accrue, ’s values narrow, with S5m’s updated (tn, fn) matching KT4m’s (tn, f) in determinacy but sharpening f to fn, reflecting the equivalence relation’s total constraint. This evolution from Km’s vagueness to S5m’s precision captures a trade-off between generality and specificity, with RMS offering a truth-value lens that parallels Kripke’s relational approach, revealing their deep structural kinship.
Applications and Insights
This chapter provides a brief sketch of possible applications of Resolution Matrix Semantics (RMS), exploring how RMS can be applied to fields such as deontic logic, artificial intelligence, and quantum computing, highlighting its ability to model complex, context-dependent reasoning with computational efficiency and philosophical depth. These applications not only demonstrate RMS’s adaptability but also offer fresh insights into its potential to bridge theoretical logic with real-world challenges.
Promising Applications of RMS method in Deontic Logic and Other Modal Logic
RMS approach extends its truth-value-based framework beyond alethic modal systems (Km, KDm, KTm, KT4m, S5m) to deontic logic, which formalizes concepts of obligation (O), permission (P), and prohibition. Unlike Kripkean semantics, which relies on possible worlds and accessibility relations, RMS buses a finite set of truth values—necessary truth (tn), contingent truth (tc), contingent false (fc), and necessary false (fn)—augmented by indeterminate values (t, f, t/f). This approach offers a substantive alternative for modeling deontic operators by assigning truth values directly to normative statements, avoiding relational structures.
In deontic logic, the modal operator O (obligation) can be interpreted in RMS as follows: a proposition Op takes tn if p is obligatory in all contexts (e.g., a universal duty), tc if p is obligatory in the current context but not universally (e.g., a situational duty), fc if p is not obligatory but permissible in some contexts, and fn if p is forbidden (never obligatory). The indeterminate value t (tn or tc) can represent cases where p’s obligation status is contextually ambiguous—obligatory in some sense but not precisely determinate—while f (fc or fn) indicates a lack of obligation, possibly ranging from permissible to prohibited. This setup allows RMS to capture nuances like deontic dilemmas (e.g., Op ∧ O¬p) by exploring cases where conflicting obligations might resolve differently.
RMS’s strength lies in its flexibility to handle deontic paradoxes without relational complexity. For instance, in addressing dilemmas or explosion (e.g., Oa ∧ O¬a ⊃ Ob), RMS can assign indeterminate values to reflect uncertainty, then resolve them via sub-cases, preventing the classical explosion where contradictions imply arbitrary obligations, unlike world-based models. This approach draws inspiration from prior non-Kripkean matrix-based deontic systems (Kuznetsov, [2004)], adapting RMS’s 4-valued structure to normative reasoning, with potential for further refinement in capturing strong versus weak obligations.
In a similar way, the RMS approach can be adapted to other branches of modal logic, such as epistemic (concerning knowledge and belief), doxastic (concerning belief and reasoning), temporal (concerning time and change), and dynamic (concerning actions and updates), among others.
Artificial Intelligence and Natural Language Processing
Resolution Matrix Semantics (RMS) brings a fresh perspective to artificial intelligence (AI) and natural language processing (NLP) by tackling the ambiguity and uncertainty that define human language and real-world reasoning. With its core set of determinate and indeterminate truth values, RMS moves beyond the rigid true/ false binary of classical logic. This makes it an ideal tool for AI systems that grapple with imprecise data, offering a streamlined, truth-value-based alternative to the relational complexity of Kripkean semantics. Beyond language, RMS’s flexibility extends to cutting-edge fields like quantum computing, where its handling of indeterminacy mirrors the probabilistic nature of quantum mechanics, enriching its utility across technology and science.
In NLP, RMS excels at capturing the graded truth of everyday language. A statement like "the weather is pleasant" isn’t simply true or false—it’s true in some contexts, false in others—fitting naturally as t,resolving to tn (universally pleasant) or tc (pleasant now) depending on the situation. This nuance boosts AI tasks like sentiment analysis: a review saying "the film was okay" might take t for "positive sentiment," reflecting its ambivalence rather than forcing a binary label. RMS’s mechanism resolves such indeterminacy systematically, enhancing chatbots, translations, and text understanding by aligning with the fuzzy, context-driven nature of human communication. The tailored tableau method further supports this by efficiently testing interpretations, ensuring practical applicability.
For AI decision-making, RMS shines in uncertain environments, such as autonomous vehicles or medical diagnostics. A vehicle sensor detecting "obstacle ahead" with partial confidence might warrant t—tn if backed by multiple readings, tc if tentative— allowing cautious navigation without overreaction. In medicine, "patient has condition X" could be t based on suggestive tests, guiding next steps without hasty judgments. This approach leverages RMS’s focus on truth values over world-relations, simplifying computation for real-time systems. Epistemically, RMS models knowledge or belief—say, "the agent knows the path is clear"—with tn for certainty and f for doubt, supporting multi- agent coordination or belief updates with nuanced reasoning.
RMS’s reach extends further into quantum mechanics, where its indeterminate values echo the superposition of quantum states. A particle’s spin, indeterminate until measured, aligns with t/f—potentially resolving to tn (true across all contexts post-measurement) or fc (false here, true elsewhere)—mirroring quantum indeterminacy before collapse (Zurek, W. H. (1991). In quantum computing, RMS could represent qubit states as t pre- measurement, aiding algorithm design by mapping truth values to probabilities or amplitudes. This connection not only ties RMS to AI’s theoretical underpinnings but also positions it as a bridge to quantum-enhanced NLP or decision systems, where probabilistic reasoning is key. By uniting language processing with quantum insights, RMS offers AI a versatile, philosophically rich framework that simplifies complexity while embracing the vagueness of reality.
Conclusion
This paper has presented Resolution Matrix Semantics (RMS) as an innovative, truth-value-based framework for modal logic, distinct from Kripkean relational semantics. By defining systems Km, KDm, KTm, KT4m, and S5m with a determinate and indeterminate truth value structure, RMS offers a robust alternative that captures modal nuances without relying on accessibility relations. The proofs of soundness and completeness confirm the logical rigor of Resolution Matrix Semantics (RMS), further supported by a tailored tableau method that systematically validates formulas with practical efficiency, while its applications in deontic logic, artificial intelligence, and quantum computing domains illustrate its versatility.
RMS’s emphasis on truth over relations simplifies computation and enhances its relevance to philosophy,technology, and science.
References
- Kearns, J. T. (1981). Modal semantics without possible worlds. The Journal of Symbolic Logic, 46(1), 77-86.
- Ivlev, Y. V. (1985). Substantive Semantics of Modal Logic.Moscow: Moscow State University Publishers.
- Ivlev, Y. V. (1991). Modal Logic. Moscow: Moscow StateUniversity Publishers.
- Avron, A., & Zamansky, A. (2010). Non-deterministic semantics for logical systems. In Handbook of Philosophical Logic: Volume 16 (pp. 227-304). Dordrecht: Springer Netherlands.
- Omori, H., & Skurt, D. (2024). On Ivlev’s semantics for modality. In Many-valued Semantics and Modal Logics: Essays in Honour of Yuriy Vasilievich Ivlev (pp. 243-275). Cham: Springer International Publishing.
- Kripke, S. A. (1963). Semantical considerations on modal logic. Acta philosophica fennica, 16.
- Priest, G. (1979). The logic of paradox. Journal of Philosophical logic, 219-241.
- Kleene, S. C. (1952). Introduction to Metamathematics. Amsterdam: North-Holland.
- Kouznetsov, A. (2004, May). Quasi-matrix deontic logic. In International Workshop on Deontic Logic in Computer Science (pp. 191-208). Berlin, Heidelberg: Springer Berlin Heidelberg.
- Zurek, W. H. (1991). Decoherence and the transition from quantum to classical. Physics today, 44(10), 36-44.
- Chellas, B. F. (1980). Modal logic: an introduction. Cambridge university press.
- Fitting, M., Mendelsohn, R. L., & Girle, R. A. (1998). First- order modal logic. Dordrecht: Kluwer Academic.
- Kuznetsov, A. (1999). Quasi-matrix deontic logic (PhDthesis). Moscow: Moscow State University.
- Smullyan, R. M. (1968). First-Order Logic. New York: Springer-Verlag.
APPENDIX A- System KTm completeness proof.
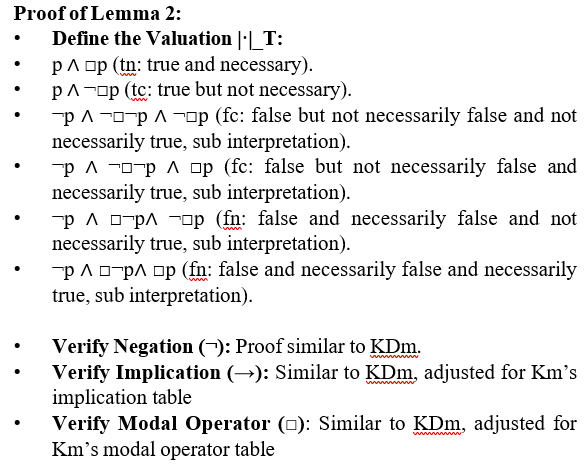
For system KTm completeness, we prove two lemmas.
Lemma 1: A consistent set Γ can be extended to a maximal consistent set Γ with:
Proof: Use Henkin-style construction, enumerating formulas and adding consistent ones, ensuring maximality and consistency with KTm axioms. Properties hold via closure and contradiction avoidance.

Conclusion: If A is valid but not provable, ¬A is consistent, extends to T, ¬A valid formula, then A is not a valid formula, contradicting the assumption. KDm is complete.
|·|_T matches Km semantics.
Conclusion: Same as in previous systems. Km is complete.