
International Journal of Natural Sciences and Interdisciplinary Research(IJNSIR)
ISSN: 3143-1046 | DOI: 10.33140/IJNSIR

Research Article - (2026) Volume 1, Issue 2
Special-relativistic Mechanics for Pedestrians, Including a Generalization of Newton’s Axiomatic and A Dynnnic Derivation of the Poincare Transformation Zritbout Evoking the Principle of Relativity and Any Non-Mechanical Quantities
Received Date: May 11, 2026 / Accepted Date: Jun 01, 2026 / Published Date: Jun 15, 2026
Copyright: ©2026 Peter M. Enders. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Enders, P. M. (2026). Special-relativistic Mechanics for Pedestrians, Including a Generalization of Newtonâs Axiomatic and A Dynnnic Derivation of the Poincare Transformation Zritbout Evoking the Principle of Relativity and Any Non-Mechanical Quantities. Int Nat Sci Int Rese, 1(2), 01-15.
Abstract
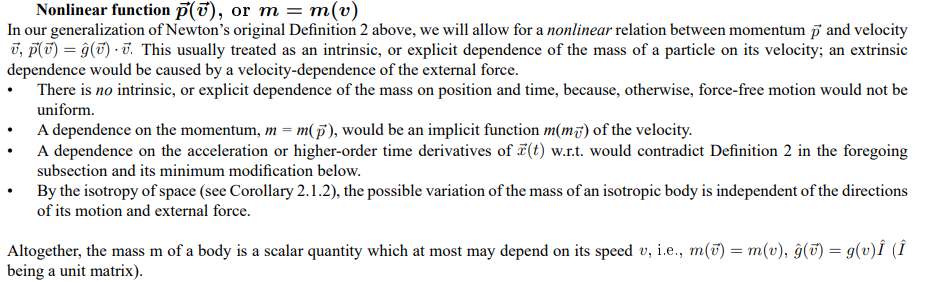
The special-relativistic equation of motion is derived from first principles by generalizing Newton’s steps from the change of stationary states to the equation of motion. Most important, the change of the mass of a particle is allowed to intrinsically depend on its velocity, while a dependence on time, position, acceleration etc. is nonphysical. (An extrinsic dependence would occur when the external force acting upon it would depend on the velocity.) Generalizations of Newton’s definition of momentum and axioms are proposed which enable that. If the mass depends on the velocity and the space is still flat, the Minkowski spacetime inevitably emerges.
When compared with kinematic derivations, this treatment exhibits the advantage to show the applicability of the Poincare transformation to the case of a particle subject to an external force. Even more important, not special relativity needs an additional assumption for introducing the — when compared with classical mechanics — new parameter c. On the contrary, classical mechanics (often implicitly and unconsciously) makes one or more additional assumptions which suppress the appearance of c.
Last but not least, we are not aware of another related text which needs NEITHER the principle of relativity NOR the properties of light, NOR using any non-mechanical quantity.
Introduction
One characteristic feature of special relativity consists in that a speed-dependent mass m( v) occurs. Surprisingly enough, already various considerations in Newton’s ‘Principia’ [69] do allow for a generalization towards a velocity-dependent mass. Admittedly, a much more general and powerful treatment is Dirac’s ‘Forms of Relativistic Dynamics’ [14]. However, he uses the principle of relativity, and his transition from Galilean to Lorentz invariance is rather a heuristic one. It suggests c to be added to non-relativistic mechanics to obtain special-relativistic mechanics. We will show that the opposite holds, riz., that within non-relativistic mechanics, assumptions are (implicitly and/or unconsciously) made which suppress the appearance of c. We thus consider this contribution to be a justification of Dirac’s approach, too.
Another major advantage consists in that we will need NEITHER the principle of relativity (for certain subtleties, see, e.g. [43] and refs. therein) NOR the properties of light, NOR non-mechanical quantities. Therefore, as first attempted by Ignatowsky in 1910 [52] and Frank & Rothe [40] one year later, this approach does not rely on Einstein’s second postulate about the independence of the speed of light of the velocity of the observer ([16] pp. 900f. ). While there is a huge amount of approaches avoiding Einstein’s second postulate (see, e.g. [13][63][74][77] and references therein), we are not aware of an approach avoiding the principle of relativity. Cester [9] also has argued that Newton’s second axiom allows the mass to be velocity-dependent. This argument is formally correct, though it contradicts the explanation to Definition 2 in the ‘Principia’ according to which m = const., see Subsection 2.2. For this, a generalization of Newton’s Definition 2 will be proposed which frees us from the limitation m = const.
Thus, in Section 2, we will begin with a generalization of Newton’s notions of space and time, Definition 2, and the “Axioms or the Laws of Motion”. Special attention will be paid to the possibility of a dependence of the mass of a body on its velocity. In Section 3, we will generalize Newton’s equation of change of (stationary) states and calculate the velocity-dependence of the mass in a rigorous manner but the numerical value of the reference speed to be used. Section 4 will sketch special-relativistic mechanics, basing on the Poincar”e transformation (Subsection 4.1) and the corresponding generalization of d’Alembert’s force of inertia (Subsection 4.2). Moreover, Einstein’s famous equation E = mc2 will be derived without non-mechanical quantities (Subsection 4.3), while the Subsections 4.4 f. will deal with the velocity-dependence of the mass, again, and its fatal consequence for Heaviside’s gravito-electromagnetic equations, for which we will give a short heuristic derivation. Finally, Section 5 will summarize and conclude this article. It represents a major extension and completion of our earlier treatments [30][32][33][34][82][83]. More important, this fully spatially three-dimensional treatment, (i), is much less involved than fully spatially three-dimensional kinematic ones and, (ii), avoids certain problems occurring in one-dimensional treatments like that noted by Feigenbaum in [39] p. 3.
Altogether, a treatment “carefully excising all that is superfluous and redundant” ([39] p. 1) is striven for.
Generalization of Newtons Definition of Momentum and Axioms
“Since the Principia is one of those works everyone talks of but no one reads, anything said about it other than the usual honey-sauced eulogy must stand up against righteous indignation from all sides. But it is a work of science, not a bible. It should be studied and weighed — admired, indeed, but not sworn upon. It has its novelties and its repetitions, its elegant perfections and its errors, its lightning abbreviations and its needless detours, its extraordinary standards of rigor and its logical gaps, its elimination of stated hypotheses and its introduction of unstated ones.” (Cliflord Ambrose Truesdell [85])
In contrast to Newton’s Law (Axiom) 2, his Definition 2 prescribes the mass of a body to equal its constant rest mass, m = m0. This inevitably leads to d’Alembert’s [1] Galileo-covariant force of inertia, therefore, to non-relativistic mechanics. The simplest possibility to free us from that constraint consists in omitting the explanation to Definition 2. However, we exploit this opportunity to endeavor a broader generalization of Newton’s axiomatic in his Definition 2 and Laws (Axioms). In contrast to Born [7] and Cester et al. [9][10], not any non-mechanical quantity will be used.
“There is an experimental adage to the eflect that one should “only adjust one parameter at a time” — the theorist’s equivalent is that one should “only adjust one theoretical assumption at a time”. Con-trolled restraint in relaxing one’s input assumptions is essential if one is to isolate exactly which theoretical aspect is critical to which phenomenological result.” (Baccetti, Tate & Visser 2012 [3]).
Space and Time
For later use, we abandon Newton’s discrimination between absolute and relative times ([69] Definitions, Scholium) and add coordinate systems.
Prerequisite 2.1.1 There are continuous and unlimited three-dimensional space and one-dimensional time. This prerequisite is taken for granted in all branches of physics which use con-tinuous coordinate systems. It does not yet mean that the metric is Euclidean.
Corollary 2.1.1 If there are no matter and fields, then, by the principle of sufficient reason, space and time are homogeneous and isotropic; space is Euclidean. If there is just one particle but still no interaction, the space is homogeneous and isotropic w.r.t. a motion of that particle, its metric is still Euclidean.
Prerequisite 2.1.2 In that cases, space and time may be equipped with arbitrarily many conveyable Cartesian three- (x, y, z) and one-dimensional (t) coordinate systems, respectively.
Corollary 2.1.2 Those coordinate systems can arbitrarily move against each other.
Definition 2.1.1 The coordinate systems, in which the mechanical laws assume their simplest form, are called inertial, or Galilean coordinate systems aka reference frames.
Newton’s Original Definition 2 [gea..ndert]
The original formulation of Newton’s Definition 2 is this [69]:
Definition 2 Quantity of motion [nowadays ‘momentum’] is a measure of motion that arises from the re/ocity and the quantity of matter jointly.
. . . if a body is twice as large as another and has equal velocity there is twice as much motion, and [moreover] if it has twice the velocity there is four times as much motion.

Notice that Newton has paid special attention to the case that the body begins to move from the state at rest [70]. Metaphysically, or heuristically, one could argue that there is no influence of the velocity if there is no velocity.
Newton himself has not explored the possibility of a variable mass, at least not in the ‘Principia’. His concrete results correspond to a constant mass.
1. A body moves along an ellipsis, if it is subject to a centripetal force ∝ r being located in its centre. (Book I, Sect. 2, Prop. 10 — three-dimensional harmonic oscillator).
2. A body moves along an ellipsis, if it is subject to a centripetal force ∝1/r2 being located in one of its focuses. (Book I, Sect. 3, Prop. 11 — Kepler ellipsis).
New Definition 2.
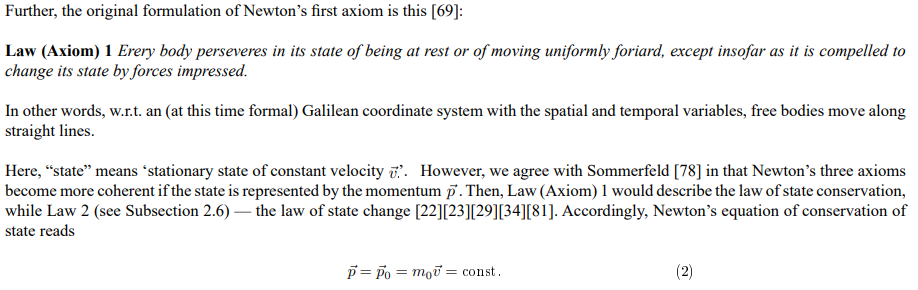
Newton’s Original Law (Axiom) 1
New Axiom 1. Extended Principle of Relativity
We propose the following generalization.
New Axiom 1. All coordinate systems, which do not rotate relatively to each other, are physically equivalent.
In contrast to the common treatments (notably, [69] Corollary 5 to the axioms, [19] p. 639), this principle of relativity is not limited to inertial systems.
We will show that it is not needed for the transition from non-relativistic to special-relativistic mechanics through not using it in what follows.
Corollary 2.5.1 By the principle of sufficient reason, w.r.t. an (at this time for-mal) Galilean coordinate system with the spatial and temporal variables, free bodies move along straight lines.
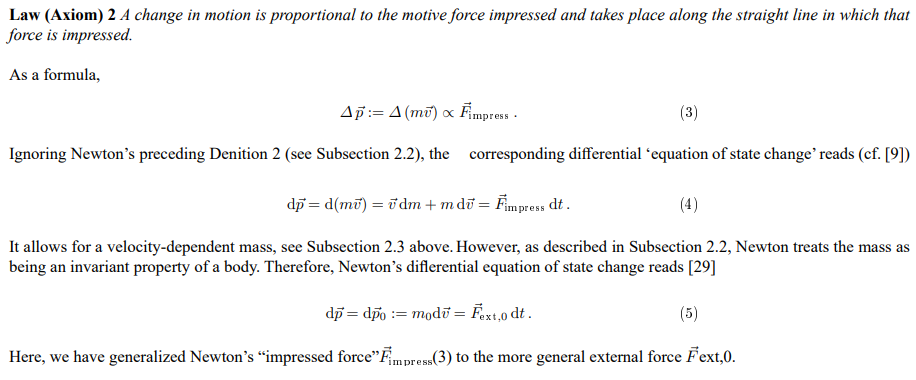
Newton’s Original Law (Axiom) 2
Further, the original formulation of Newton’s second axiom is this [69]:
New Axiom 2: Equilibrium of Forces
Definition 2.7.1 “A body so small that, for the purpose of our investigation, the distances between its different parts may be neglected, is called a material particle.” (Maxwell [60]).
This article deals solely with the motion of particles, i.e., translations, no rotations.
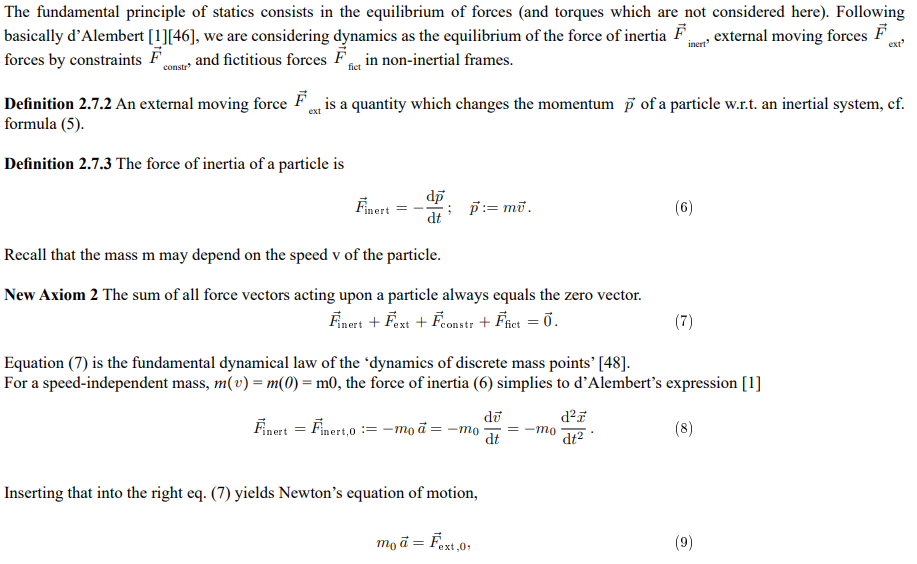
first published in Euler’s 1736 ‘Mechanica’ [37] in the form ![]()
Newton’s Original Law (Axiom) 3
Finally, the original formulation of Newton’s third law (axiom) reads:
Law (Axiom) 3 To any action there is a always an opposite and equal reaction; in other words, the actions of two bodies upon each other are a/iays equal and opposite in direction.
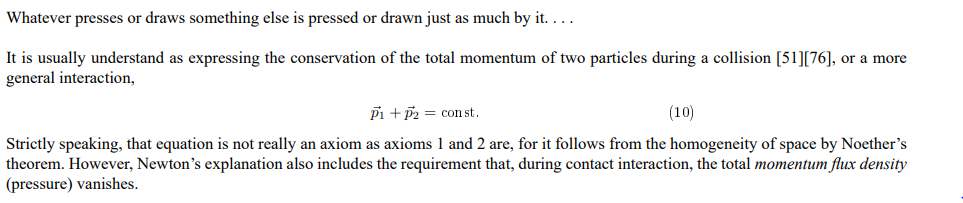
New Axiom 3: Conservation of Total Momentum and Momentum Flux Density
For this and the sake of completeness, the following generalization is proposed:
New Axiom 3 The total momentum of a system is constant except insofar asa net external force acts upon it. During contact interaction, the total momentum ux density vanishes.
Generalization of Newtons Equation of State Change
Symmetry, or Galilean and Non-Galilean Invariance
All physically correct equations must be invariant (not necessarily covariant!)w.r.t. the symmetry operations of the physical spaces involved, notably, position space and time.
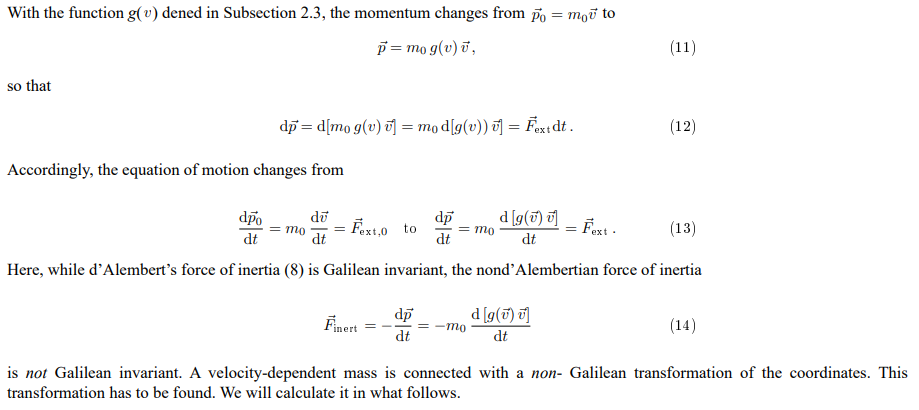
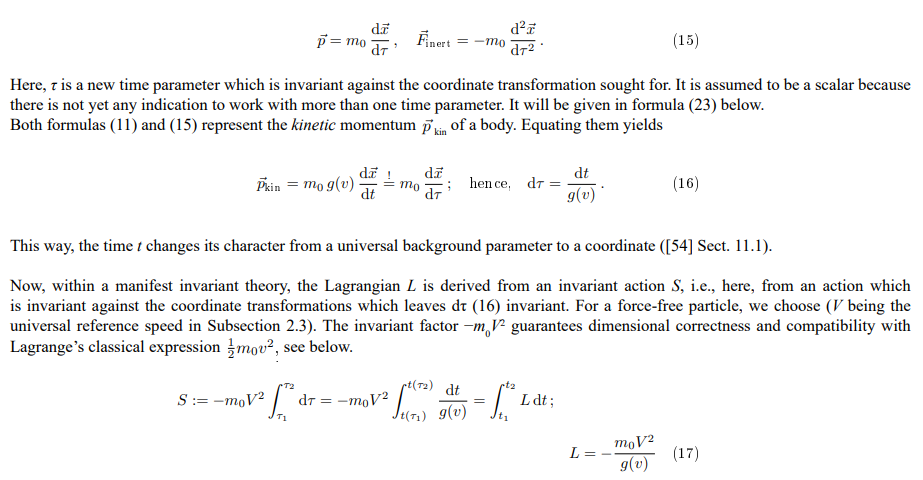
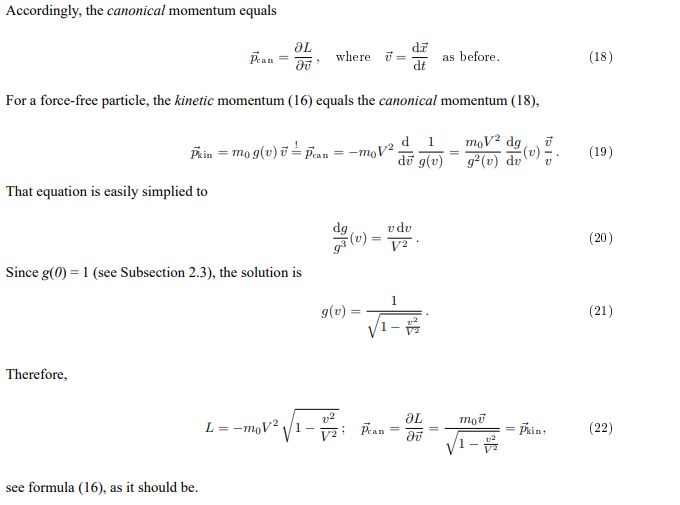
Calculation of the Function g( v)
A most simple way to find that non-Galilean transformation consists in constructing a covariant, i.e. manifest invariant theory in which the momentum and force of inertia transform in the same manner as the coordinates do,
Special-relativistic Mechanics
The Poincare Group
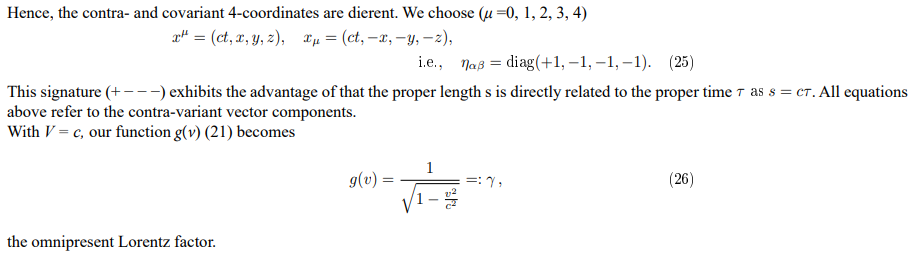
Knowing g( v) (21), we are able to determine the coordinate transformations which leave

The set of all ane linear differentiable coordinate transformations, which leave the r.h.s. unchanged, is well known to be the Poincare group, the group of Minkowski spacetime isometries [65][66].
Independent of that, the linearity of the Poincare transformation can be reasoned as follows [2][33]. They interrelate coordinate systems to each other. Consider the case of two free bodies w.r.t. two Galilean frames. According to Corollary 2.5.1, both ones move along straight world lines. The physically reasonable coordinate transformations between straight lines are linear, see, e.g. [45] p. 167, [71] p. 554; some subtleties are dealt with in [33] App. A.
Confirming our statement above that V is a universal constant, that linearity implies V to be a universal constant in all coordinate systems, in which the action S (17) holds true. This represents another proof of the constancy of the speed of light w.r.t. all inertial systems.
In agreement with the Erlangen program [55], the invariant innitesimal length cdτ (24) defines one of the two non-Euclidean Minkowski geometries.
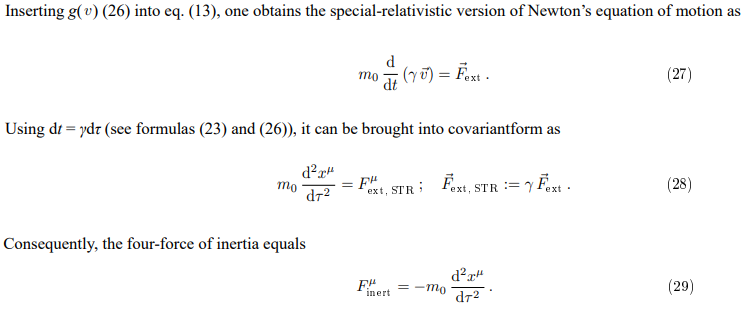
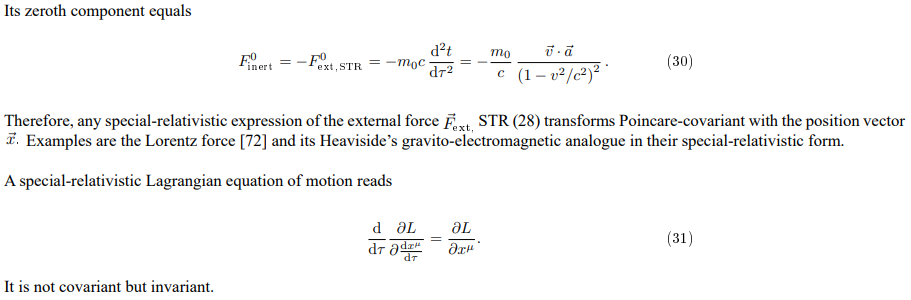
Special-relativistic Equation of Motion and Force of Inertia
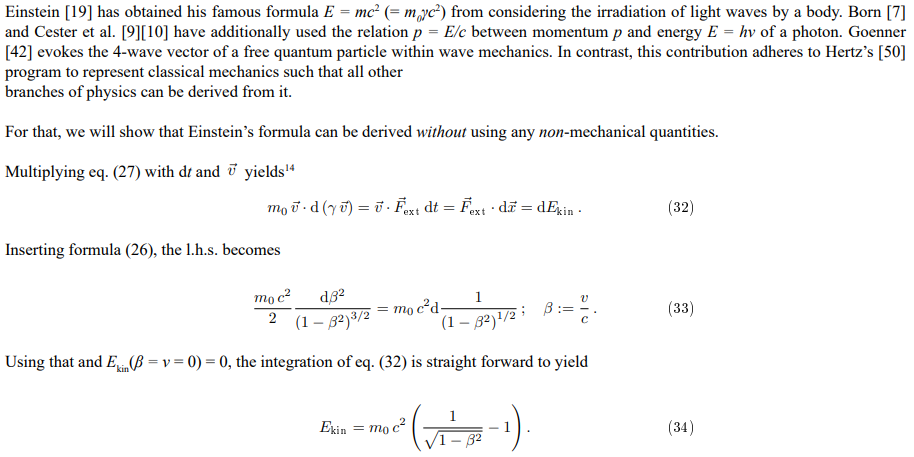
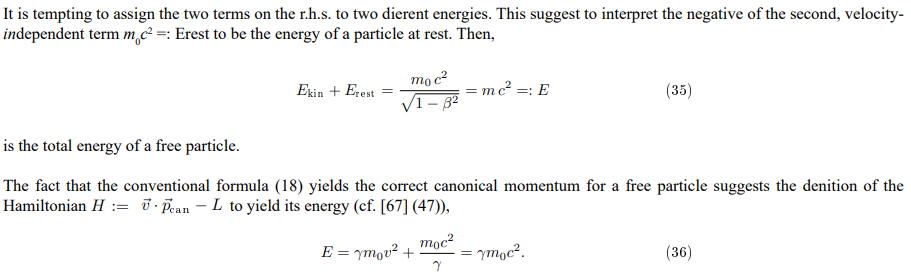
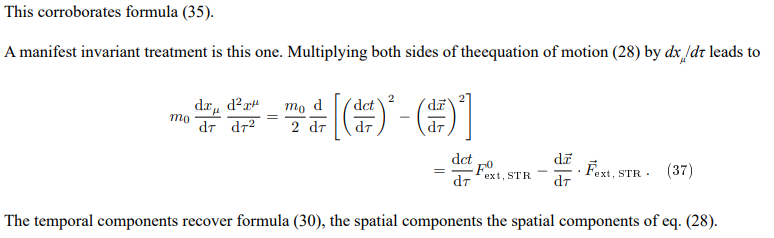
E = mc2
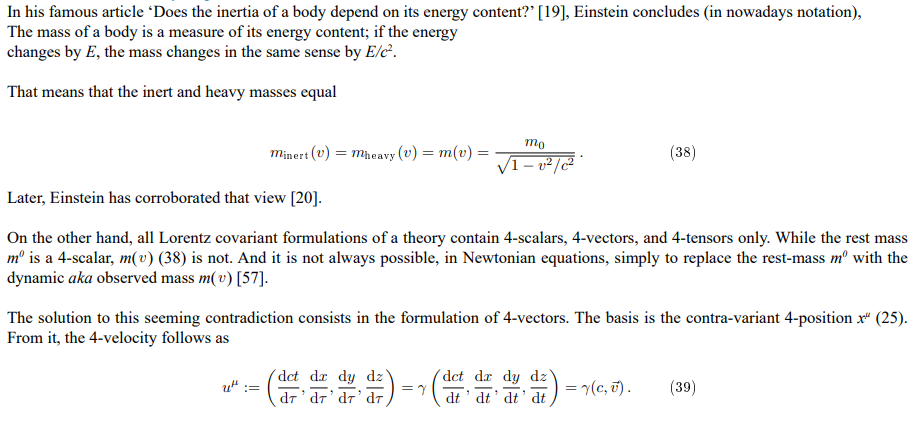
More on the Velocity-Dependent Mass m(v)
On Heaviside’s gravito-electromagnetic equations
Einstein’s result quoted at the beginning of the foregoing Subsection 4.4 exhibits crucial implications for Heaviside’s gravito-electromagnetic equations [47][58].
Notice that, surprisingly enough, the structure of them can be derived in a rather straightforward manner [36]. An elementary Lorentz covariant theory of real-valued vector elds contains at least a real-valued 4-vector eld amplitude Aν(xμ) and a Lorentz covariant equation of motion. The simplest non-trivial covariant dierential equation reads
Summary and Conclusion
“Die Spezielle Relativit.a.tstheorie hat mit Licht nichts zu tun. Es ist genau umgekehrt. Licht hat mit Relativitatstheorie zu tun! Denn auch das Verhalten von Licht unterliegt den Rahmenbedingungen der Kinematik.” (Romano Rupp 2022 [75] p. 97)
En: The special relativity theory has nothing to do with light. It is exactly the other way round. Light has to do with relativity! Because also the behavior of light is subject to the basic conditions of kinematics
We have presented a dynamical derivation of the Poincare transformation starting from exploring how Newton [69] has dealt with the mass of a body. While Newton’s Law (Axiom) 2 allows the mass of a body to depend on its velocity, his Definition 2 does not. For this, we have proposed a corresponding generalization of Newton’s [69] Definition 2 and Laws (Axioms) of motion. That ineritably leads to special-relativistic mechanics but the value c of a universal speed. Hence, special-relativistic mechanics does not arise from some require-ment(s) added to classical mechanics — on the contrary, classical mechanics contains assumptions which suppress the speed of light c.
“. . . special relativity is fully determined by the development of Galileo’s thoughts. Why and how did it take so long for this to have been realized? . . . the epistemology of the theory is totally decoupled from any knowledge of the behavior of light. . . ” (Feigenbaum 2008 [39] p. 29).
“Why hadn’t Galileo determined the full range of systems that embody his thoughts? More seriously, why hadn’t the mathematically superior Newton? Why hadn’t the poser of the brachistochrone, Leibniz, nor various of the Bernoulli? More significantly, why hadn’t the extraordinarily powerful Lagrange? And then why not Lorentz? Unbelievably, why not Poincare? And why did Einstein need to, and always continued to, base it inextricably linked to light?” (Feigenbaum 2008 [39] p. 30).
It [time as a parameter] could as well have been introduced in the nineteenth century, before relativity, motivated by the elegance it brings to the treatment of canonical transformations and other advanced topics. (Oliver David Johns 2005 [54] Introduction to Ch. 11, p. 267). Obviously, there was not any experimental hint to deviate from Newton’s equation of motion and the corresponding Galilean transformation.
This resembles the history of the energy law which — mathematically — already was in the hands of Huygens. This contribution simplifies, improves, and completes our previous contributions on the dynamical derivation of the Lorentz transformation [30][32][81][83]. The dependence of the mass of a body on its velocity is derived in a rigorous manner without using any non-mechanical quantities as done, e.g., by Born [7] and Cester et al. [9][10]. Planck [72] has exploited the Lorentz transformation properties of the Lorentz force for deriving the Lorentz covariant equation of motion for an electrically charged particle. Here, his pioneering result is comprised in a more general manner.
As within any theory of this kind [80], the numerical values of universal constants in it like the reference speed V cannot be determined by the theory itself. It can be stated, however, that V is a space-time constant and Poincar”e scalar, and so c is. Therefore, as first shown by Ignatowsky [52] and Frank & Rothe [40], it is not necessary to require the speed of light to have one and the same value w.r.t. all inertial systems (Einstein’s second postulate [16] in its second formulation in § 3, pp. 900f.). Feigenbaum even writes, “. . . that the constant speed of light is unnecessary for the construction of the theories of relativity, but overwhelmingly more, there is no room for it in the theory” [39] p. 3. Our treatment confirms the first statement. Rupp stresses that the asymptotic limit c for a body with a rest mass m0 > 0 is a pure/y kinematic rather than dynamical eflect ([75] p. 100; see also [33]).
The consequences of the Poincare transformation when compared with the Galilean transformation, in particular, the synchronization of clocks in the ab-sence of absolute time, is beyond the scope of this article (see, e.g. [39] pp. 15f. for a straight mechanical method). Knowing the Poincare transformation, however, that should be much easier than without knowing it.
Homogeneity and isotropy of space and time when space is empty are not postulated but based on the principle of sufficient reason. Exploiting that and the equality of kinetic and canonical momenta for a force-free body, the com-mon difficulties of the derivation of the Lorentz and Poincare transformations, respectively, in 3 + 1 dimensions are avoided. The possible velocity-dependence of the mass implies the introduction of the new time parameter τ which — con-trary to the ordinary time within non-relativistic mechanics — is not invariant against the Galilean transformation. The set of affine linear diflerentiable coor-dinate transformations, w.r.t. which dτ = 1 − v2/c2 dt is invariant, is the set of Poincar”e transformations.
Gomori & Szabo” have claimed that “Lorentz covariance and the principle of relativity are not completely equivalent” ([43] Sect. 5, [84] Abstract). Our view on that issue is rather pragmatical. Any equation is invalid, if both of its sides do not transform in one and the same manner. This makes the purely point-mechanical arguing for the Lorentzian case in [84] (20) fl. doubtful (in contrast to the Galilean description of two point masses connected with a spring in [84] pp. 5fl.). Any expression for the external 3-force ![]() is correct if and only if it is the spatial part of a 4-vector.
is correct if and only if it is the spatial part of a 4-vector.
All kinematic derivations of the Lorentz and Poincare transformations, respectively, we are aware of presuppose the principle of relativity. In contrast, we do not need it because we are not beginning with the transformation between reference frames. This frees us from the subtleties of the relationship between Lorentz covariance and the principle of relativity just mentioned. Instead, we have explored the consequences of a velocity-dependence of the mass of a body for the symmetry of the laws of mechanics. If the mass is allowed to depend on the velocity, the symmetry of the covariant form of the inertial force,

changes from Galilean (c ) to Poincare covariance (0 < c < ). However, any coordinate transformation within one reference frame can be interpreted as a coordinate transformation between two reference frames. Many forces used within non-relativistic mechanics, notably, potential forces, are not compatible with special relativity. For this, most probably, a rigorous special-relativistic description of interactions needs /e/d interaction. An alter-native approach may be Lagrangian mechanics with time as a coordinate [54].
The symmetry of a single solution of an equation can be smaller than that of the equation itself. A well-known example is given by the two solutions x 1,2 = 1 to the equation x2 = 1. The set of all solutions (sometimes even some subsets of them) exhibits the symmetry of the equation [31]. Are there solutions to Poincare-invariant equations which are not Poincare-invariant?
When ‘Lorentz covariant’ is understood as ‘manifest invariant’ as formulated in terms of four-scalars, -vectors, -tensors, and spinors, Lorentz covariance is sufficient but not necessary; really necessary is Lorentz invariance. Consider, for instance, the Lorentz covariant equation Aν = Bν for two 4-vectors Aν and Bν. Now, if the function f(xµ) is not a Lorentz scalar, the equation f(xµ)Aν = f(xµ)Bν is not Lorentz covariant but still Lorentz invariant.
Acknowledgment
This article is a completion and extension of our earlier publications [25][29][33] and presentations to the Physical Society of Germany [32][83] (see also [30] Ch. 4). The comparison of kinetic and canonical momenta was first proposed in 2022 [32]. We gratefully acknowledge all colleagues for their useful comments during and after them. We thank Hassan Bolouri for referencing to [20]. Part of this work has been done at the Altynsarin Pedagogical Institute (now University), Arkalyk, Kazakhstan [35][36]. The cordial hospitality over there is warmly re-membered. Moreover, one of us (PE) would like to thank the German TEX user group Dante e.V. for numerous help and the many enthusiasts in the internet who share their knowledge. The translations are due to DeepL Professional.
References
- J. B. le Rond d’Alembert, Traité de dynamique, Paris: David laine 1743,Sect. IV.1.
- Baccetti, V., Tate, K., Visser, M. (2012). Inertial frames without the relativity principle. Journal of High Energy Physics, 2012(5), 1-43.
- Ref. [2], Subsection 2.6, p. 5.
- Bailey, J., Borer, K., Combley, F., Drumm, H., Krienen, F., Lange, F., Hattersley, P. M. (1977). Measurements of relativistic time dilatation for positive and negative muons in a circular orbit. Nature, 268(5618), 301-305.
- Baumgarten, C. (2019). A Two-Page” Derivation” of Schroedinger’s Equation. arXiv preprint arXiv:1907.09917.
- Bertrand, J. (1873). Théoreme relatif au mouvement d’un point attiré vers un centre fixe. CR Acad. Sci, 77(16), 849-853.
- Born, M. Die Relativitätstheorie Einsteins, Heidelberg: Springer 5th ed., pp. 244f.; cited after [10].
- Campisi, M., Kobe, D. H. (2010). Derivation of the Boltzmann principle. American Journal of Physics, 78(6), 608-615.
- Cester, F., Clemente, M., Korfl, H. M. (2019). Newton and relativity: An alternative approach to relativistic mechanics by means of the Lez Secunda.
- Cester, F. (2023). “Newton and Relativity”.
- Coleman, B. (2003). A dual first-postulate basis for special relativity. European journal of physics, 24(3), 301-313.
- Cardoso Dias, P. M. (1999). Eulers “Harmony” Between the Principles of “Rest” and “Least Action” The Conceptual Making o Analytical Mechanics. Archive for history of exact sciences, 54(1), 67-86.
- Datta, S. (2022). A Revisit to Lorentz Transformation without Light. arXiv preprint arXiv:2212.03706.
- Dirac, P. A. (1949). Forms of relativistic dynamics. Reviews of Modern Physics, 21(3), 392.
- Duarte, S. E. S., Lima, N. W. (2020). Special relativity from classical gedanken experiments involving electromagnetic forces: a contribution to relativity without light. European Journal of Physics, 41(4), 045602.
- Einstein, A. (1905). Zur elektrodynamik bewegter körper. Annalen der physik, 17(10), 891-921.;En: “On the Electrodynamics of Moving Bodies”, Doc. 23, pp. 140-171.
- Renn, J. (Ed.). (2005). Einstein’s Annalen papers: the complete collection 1901-1922. John Wiley & Sons.
- Beck, A., Havas, P. (1989). The collected papers of Albert Einstein (Vol. 2). The Siiss Kears: Vritings 1900-1909 (consult.), Princeton: Princeton Univ.
- Einstein, A. (1905). Does the Inertia of a Body Depend on its Energy Content?. Annalen der Physik, 18(639), 67-71. Doc.24, pp.172-174.
- Einstein, A. (1911). Über den Einfluß der Schwerkraft auf die Ausbreitung des Lichtes. Annalen der Physik, 35(10), 898-908.
- Enders, P. (2006). Equality and Identity and (In) distinguishability in Classical and Quantum Mechanics from the Point of View of Newton’s Notion of State. In Frontiers of Fundamental Physics: Proceedings of the Sixth International Symposium “Frontiers of Fundamental and Computational Physics”, Udine, Italy, 26–29 September 2004 (pp. 239-245). Dordrecht: Springer Netherlands.
- Enders, P. (2006). Von der klassischen Physik zur Quantenphysik: Eine historisch-kritische deduktive Ableitung mit Anwendungsbeispielen aus der Festkörperphysik. Berlin, Heidelberg: Springer Berlin Heidelberg. [From Classical to Quantum Physics. A Historical-Deductive Approach with Applications from Solid-State Physics] .
- Enders, P. Is Classical Statistical Mechanics Self-Consistent? (A paper in honor of CF von Weizsäcker, 1912-2007), Progr. Phys. 3, July, 85-87.
- Enders, P. (2008). Equality and Identity and (In) distinguishability in Classical and Quantum Mechanics from the Point of View of Newton’s Notion of State, Icfai Univ. J. Phys. I, 71-78.
- Enders, P. (2009). Towards the Unity of Classical Physics. Apeiron, 16(1), 22-24.
- Enders, P. (2010). Precursors of force fields in Newton’s’ Principia’. Apeiron: Studies in Infinite Nature, 17(1), 22-27.
- Enders, P. (2009). Underdeterminacy and Redundance in Maxwell’s Equations. Origin of Gauge Freedom-Transversality of Free Electromagnetic Waves-Gaugefree Canonical Treatment without Constraints. Electronic Journal of Theoretical Physics, 6(22), 135-166.
- Enders, P. (2009). Gibbs’ paradox in the light of Newton’s notion of state. Entropy, 11(3), 454-456.
- Enders, P. (2011). Conservation of State versus Change of State. Apeiron: Studies in Infinite Nature, 18(1), 22-28.
- Enders, P. (2014). The divergence between the historical and the logical developments of physics–Forgotten old insights can serve modern physics. Asian J. Physics.–23, 1, 273-294.
- Enders, P. (2017). Eflect equals cause, inv. plen. talk, Fundamental Frontiers of Physics (FFP1S), Nov. 27-30, Sidharth, B. G.,Murillo, J.C., Michelini, M., Perea, M. (2021). Fundamental Physics and Physics Education Research, Springer, pp. 37-47.
- Enders, P. (2022). Special relativistic mechanics for pedestrians, German Physical Society at Berlin.
- Enders, P., Rupp, R. (2023). Illustrative axiomatic derivation of the special Lorentz transformation from merely the properties of empty space and inertial systems.
- Enders, P., Suisky, D. (2005). Quantization as selection problem. International Journal of Theoretical Physics, 44(2), 161-194.
- Enders, P. M., Tulegenova, A. K., Kissabekova, A., & Anafina, A. (2024). A very fast reasoning in favor of the Poincaré group, or of Minkowskian rather than Euclidean line element. Space Sci J, 1(2), 01-04.
- Enders, P. M., Tulegenova, A. K. (2025). Maxwell’s equations in a vacuum as a consequence of the Lorentz transformation,” Space Sci. J. 2 (2025) 1, 01-03.
- Euler, L. (1736). Mechanica sive motus scientia. Mechanica sive motus Scientia.
- Euler, L. (1750). An Introduction to Natural Science, Establishing the Fundamentals for the Explanation of the Events and Changes that occur in Nature.
- Feigenbaum, M. J. (2008). The theory of relativity-Galileo’s child. arXiv preprint arXiv:0806.1234.
- Frank, P., Rothe, H. (1911). Über die Transformation der Raumzeitkoordinaten von ruhenden auf bewegte Systeme. Annalen der Physik, 339(5), 825-855.
- Gibbs, J. W. (1878). On the equilibrium of heterogeneous substances. American journal of science, 3(96), 441-458.
- Goenner, H. (2004). Spezielle Relativitätstheorie und die klassische Feldtheorie. Subsect. 4.2, p. 90.
- Gömöri, M., Szabó, L. E. (2015). Formal statement of the special principle of relativity. Synthese, 192(7), 2053-2076.
- Grieser, R., Klein, R., Huber, G., Dickopf, S., Klaft, I., Knobloch, P., Kühl, T. (1994). A test of special relativity with stored lithium ions. Applied Physics B, 59(2), 127-133.
- C. Gros, Vorlesungen Uber Elektrodynamik. Teil VII. Relatiristische Invarianz der Elektrodynamik.
- Gross, G., Hauger, W., Schrader, J., Wall, W. A. (2008). Technische Mechanik, Bd. 3: Kinetik, 10. Aufl., Berlin Heidelberg: Springer,p.91.
- Heaviside, O. (1893). A gravitational and electromagnetic analogy. The Electrician, 31(Part I), 281-282.
- von Helmholtz, H. (1898). Vorlesungen über die Dynamik discreter Massenpunkte (Vol. 1). Verlag von Johann Ambrosius Barth.
- Herrmann, F., Pohlig, M. (2023). Heaviside’s gravitoelectromagnetism: what is it good for and what not?. KITopen download.
- Hertz, H., von Helmholtz, H. (1910). Die Prinzipien der Mechanik in neuem Zusammenhange dargestellt (Vol. 3). JA Barth.
- Huygens, C. (1669). De motu corporum ex percussione, London: Royal Society, publ.1703.
- Von Ignatowsky, W. A. (1910). Einige allgemeine bemerkungen zum relativitätsprinzip. Verh. Deutsch. Phys. Ges, 12, 788-796.
- Jaynes, E. T. (1992). The gibbs paradox. In Maximum Entropy and Bayesian Methods: Seattle, 1991 (pp. 1-21). Dordrecht: Springer Netherlands.
- Johns, O. (2011). Analytical mechanics for relativity and quantum mechanics. OUP Oxford, Pt. II, 2nd edn.
- Klein, F. (1893). Vergleichende Betrachtungen über neuere geometrische Forschungen. Mathematische Annalen, 43(1), 63-100.
- Lanczos, C. (2012). The variational principles of mechanics. Courier Corporation.
- Maerk, T., Kuhn, D. Vorlesung [Lecture] 4, 1.5.1 Rest Mass versus Observed Mass.
- Mashhoon, B. (2003). Gravitoelectromagnetism: a brief review. arXiv preprint gr-qc/0311030.
- Mathews, W. N. (2020). Seven formulations of the kinematics of special relativity. American Journal of Physics, 88(4), 269-278.
- Maxwell, J. C. (1888). Matter and Motion, London: Soc. Prom. Christian Sci.
- Maxwell, J. C. (1864). “A Dynamical Theory of the Electromagnetic Field. Legare Street Press.
- Maxwell, J. C. (1873). A treatise on electricity and magnetism (Vol. 1). Clarendon press.
- Mermin, N. D. (1984). Relativity without light. American Journal of Physics, 52(2), 119-124.
- Mie, G. (1910). Lehrbuch der elektrizität und des magnetismus. F. Enke.
- Minkowski, H. (1908). Die Grundgleichungen für die elektromagnetischen Vorgänge in bewegten Körpern. Nachrichten von der Gesellschaft der Wissenschaften zu Göttingen, Mathematisch-Physikalische Klasse, 1908, 53-111.
- Minkowski, H. (2013). Space and Time: Minkowski’s papers on relativity. Minkowski Institute Press.
- Mondal, V. (2021). Einstein’s special relativity from a space-time duality principle. arXiv preprint arXiv:2105.10481.
- Moore, W. (1810). A Treatise on the Motion of Rockets, J. Nat. Phil., Chem. and Arts, XXVII, 276-285.
- Newton, I. (1833). Philosophiae naturalis principia mathematica. Vol. 1.
- See Lemma 10 and the five corollaries to it in [69] Book 1, Section 1, pp. 437f.
- Pauli, W. (2000). Relatiritatstheorie (newly ed. and commented by D. Giuliani), Berlin etc. springer.
- Max, P. L. A. N. K. (1906). Das prinzip der relativitat und die grundgleichungen der mechanik. Verhandlungen der deutschen Physikalischen Gesellschft, 8, 136-141.
- Poynting, J. H. (1883). On the transfer of energy in the electromagnetic field. Proceedings of the Royal Society of London, 36(228-231), 186-187.
- Redzic, D. V. (2026). Relativity with or without light and Maxwell. Time and Space, 2(2), 4.
- Rupp, R. (2002). Physik 1 — Eine unkonventionelle Einführung, Berlin: Springer.
- Simonyi, K., Simonyi, C., Kramer, D. (2012). A cultural history of physics. AK Peters/CRC Press.
- Singh, S. (1986). Lorentz transformations in Mermin’s relativity without light. American Journal of Physics, 54(2), 183-184.
- Sommerfeld, A. (2013). Mechanics: Lectures on theoretical physics (Vol. 1). Academic Press.
- Stefanovich, E. (2018). Relativistic quantum dynamics (Vol. 47). Walter de Gruyter GmbH & Co KG.
- Stepanov, S. S. (1999). Fundamental physical constants and the principle of parametric incompleteness. arXiv preprint physics/9909009.
- Suisky, D. (2008). Euler as physicist. Springer Science & Business Media.
- Suisky, D., Enders, P. (2001). Leibniz’ foundation of mechanics and the development of 18th century mechanics initiated by Euler. in: H. Poser (Ed.), Nihil sine ratione, Proc. VII Internat. Leibniz Congress, Berlin: Berlin-Verlag.
- Suisky, D., Enders, P. (2005). Dynamical Derivation of the Lorentz Transformation. In German Physical Society Annual Meeting, Berlin.
- Szabó, L. E. (2004). On the meaning of Lorentz covariance. Foundations of Physics Letters, 17(5), 479-496.
- Truesdell, C. (2012). Essays in the History of Mechanics. Springer Science & Business Media.
- Weizsa“cker, C. F. V. (1990). Zum Veltbild der Physik, Stuttgart: Hirzel, p. 235.
- For instance, one can give a particle in inertial system S’ the constant velocity u′ and measure its velocity u in inertial system S; V 2 = vu′u/(v + u′ − u).