
Advances in Machine Learning & Artificial Intelligence(AMLAI)
ISSN: 2769-545X | DOI: 10.33140/AMLAI
Impact Factor: 1.755

Research Article - (2026) Volume 7, Issue 2
Covariance Eigenanalysis for Direction Finding with Analytic Ray-Traced Steering Vectors
Received Date: Feb 13, 2026 / Accepted Date: Mar 24, 2026 / Published Date: Apr 17, 2026
Copyright: ©2026 Greg Passmore. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Passmore, G. (2026). Covariance Eigenanalysis for Direction Finding with Analytic Ray-Traced Steering Vectors. Adv Mach Lear Art Inte, 7(2), 01-35.
Abstract
In our setup of multiple phased array antennas, the goal was to replicate current techniques for object location. For this, we incorporated Multiple Signal Classification (MUSIC), a subspace DOA estimator for multiple narrowband sources impinging on our phased arrays. This is based on the eigendecomposition of the sample spatial covariance R^ and the resulting partition CM of into orthogonal signal and noise subspaces. Candidate directions are evaluated by the noise-subspace projection energy d(theta) = �?��?�UnHa(theta)�?��?�22 and DOA hypotheses are taken from peaks of the reciprocal pseudospectrum PMUSIC(θ) = d(θ) −1.
Here a(θ) is generated by our analytic ray tracer rather than a typical ideal plane-wave model. For each scan direction, the ray tracer returns the per-element complex field after integrating refractive optical path length and attenuation along the propagation path to each sensor, with optional instrument phase and gain terms. MUSIC is then applied, but steering-vector mismatch from refraction and loss is moved from an unmodeled error term into the forward model used inside d(θ).
This combination provides several operational advantages. MUSIC preserves super-resolution angular discrimination by exploiting covariance eigenstructure rather than relying on beamwidth- limited steering. Ray tracing reduces deterministic bias by ensuring the steering vector includes atmospheric refraction and absorption, preventing these effects from being absorbed into noise- subspace leakage. The result is a DOA estimator that remains mathematically identical to standard MUSIC, but produces bearings that are physically consistent under non-ideal propagation conditions, improving downstream fusion stability and track repeatability.
The development proceeds from the narrowband array model through finite-snapshot covariance estimation and Hermitian eigenanalysis to an explicit summation-form master equation that maps directly to loop-based implementations. The same algebra is retained when the steering vector is replaced by ray-integrated propagation, enabling a propagation-aware pseudospectrum evaluation under refracting and lossy atmospheres. Keywords: Direction-Of-Arrival Estimation, MUSIC Algorithm, Covariance Eigenanalysis, Ray- Traced Steering Vectors, Atmospheric Propagation Modeling
Keywords
Direction-Of-Arrival Estimation, MUSIC Algorithm, Covariance Eigenanalysis, Ray-Traced Steering Vectors, Atmospheric Propagation Modeling

Introduction
Direction-of-arrival (DOA) estimation uses spatial phase and amplitude structure across a receiving array to infer the bearings of one or more emitters. In multi-emitter conditions the measured snapshot vectors contain overlapping spatial signatures that are perturbed by thermal noise, interference, finite-snapshot covariance error, and array calibration mismatch. The result is that the bearing information is present but not separable by direct per-sensor inspection, and estimation performance is often dominated by model mismatch rather than by aperture alone. MUSIC addresses this regime by exploiting the eigenstructure of the spatial covariance estimate R^ . Under the standard narrowband model, the dominant eigenspace spans the signal subspace, while the remaining eigenspace spans a noise subspace that is orthogonal to the signal component. DOA estimation is implemented as a search over candidate steering vectors, where directions consistent with the signal subspace minimize the noise-subspace projection energy and therefore maximize PMUSIC(θ). This paper presents MUSIC in an implementation-oriented form and then replaces the conventional plane-wave steering model with a ray-traced steering operator. The ray tracer supplies a(θ) by integrating refractive index and attenuation along sensor-dependent paths, producing a complex steering vector whose phase and amplitude are consistent with the environment and calibrated receiver response. The remaining steps (covariance construction, eigenvalue sorting, noise-subspace projection, and scan-grid peak selection) are unchanged, but the hypothesis test is applied to a forward model that reflects propagation physics rather than a geometric far-field approximation.
Background and Historical Context
MUSIC was introduced as an eigenstructure-based approach to resolving multiple emitters beyond the mainlobe resolution limits of conventional beamforming [1]. Its core mechanism, using orthogonality between a noise subspace and steering vectors associated with true sources, is closely related to earlier eigenanalysis approaches in spectral estimation such as Pisarenko harmonic decomposition [2]. Subsequent work established the optimality of eigensystem-based high-resolution methods and analyzed the statistical behavior of subspace estimators under finite-sample covariance error, establishing bounds and comparisons to maximum-likelihood estimators, while comprehensive treatments of array processing assumptions and covariance structure are provided in standard references [3-5].
MUSIC remains operationally relevant because it separates the estimation problem into two parts with clear control variables: covariance estimation quality (snapshot count, interference conditions, calibration) and forward-model accuracy in the steering vector used during the scan. In many practical systems, performance degradation is dominated by steering mismatch rather than by eigenanalysis itself. This motivates treating the steering vector as a propagation operator, so that refraction and loss enter as modeled terms rather than residual error.
Value in Tracking
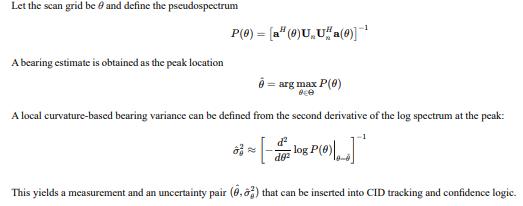
A DOA output from MUSIC can be paired with a covariance-derived uncertainty proxy and inserted directly into tracking updates. One practical proxy is the local curvature of log PMUSIC(θ) at a detected peak, which provides a bearing-variance scale that maps naturally to the measurement noise term R = σθ2 in a bearing-only filter. In addition, eigenvalue separation between the signal eigenvalues and the noise cluster provides a data-driven indicator of subspace stability, which correlates with the sensitivity of peak location to snapshot resampling and small perturbations of R^ .
When steering vectors are ray-traced, these confidence quantities can be interpreted more cleanly. A loss of peak sharpness can be associated with either reduced SNR / snapshot support in R^ or with residual propagation mismatch after the ray model is applied. This separation is useful in tracking and sensor management because it distinguishes data-limited uncertainty from model-limited uncertainty and supports explicit tuning of ηm(θ) or related mismatch parameters.
Relationship with CID, TC and TQ
In CID workflows, DOA estimates act as geometric constraints that reduce association ambiguity and improve multi-sensor fusion. The bearing estimate θ^ and its variance σ2 enter as measurement and measurement noise in standard filters, tightening the posterior covariance and increasing track quality (TQ) when the geometry is informative. Over time, repeatability of bearings and stability of peak structure provide evidence that the emitter is persistent and not attributable to transient interference, supporting target confidence (TC) through likelihood consistency.
Ray-traced steering vectors strengthen this linkage by reducing systematic bias caused by unmodeled propagation. When refraction and attenuation are incorporated into a(θ), the residual bearing error is less dominated by deterministic mismatch and more dominated by stochastic terms that can be parameterized. This tends to improve the interpretation of σθ2 as an actual measurement variance for downstream fusion rather than as a proxy contaminated by unmodeled steering error.
Advantages of this Approach
The steering vector is generalized from a geometric plane-wave phase progression to a propagation operator defined by ray-integrated phase and attenuation along the path to each sensor. For each candidate direction, the complex field is constructed from path integrals of refractive index and specific attenuation, together with calibrated element gain and instrument phase. This replaces the idealized spatial exponential with a physically propagated response while preserving the algebra of the MUSIC projection. The covariance eigendecomposition and noise-subspace partition remain unchanged; only the forward model embedded in a(θ) is modified. Any remaining discrepancy between modeled and measured propagation is isolated explicitly as a residual complex perturbation ηm(θ), separating deterministic environmental effects from stochastic mismatch.
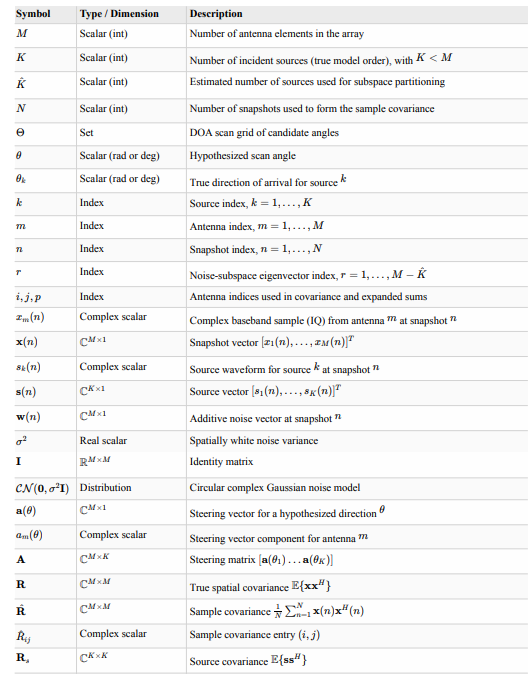
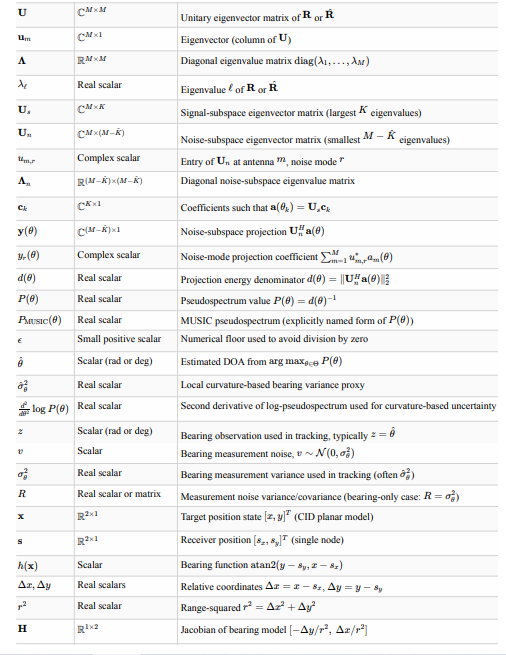
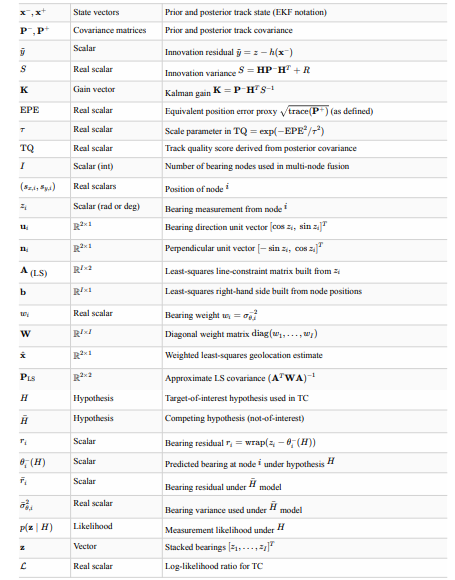
Notation Used
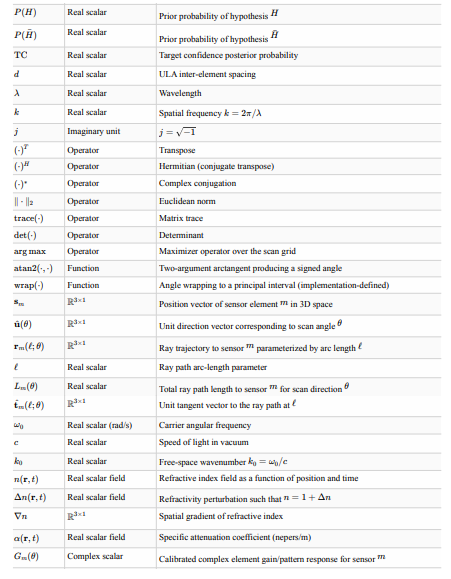
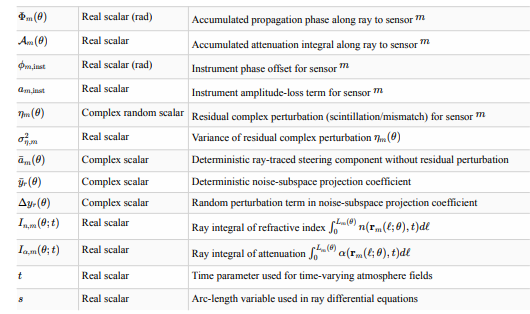
Breakout for CID
A subspace DOA estimator provides a bearing measurement with an associated uncertainty. In CID, this bearing is treated as an observation that constrains target location, improves track quality through Bayesian filtering, and contributes to target confidence through likelihood-based evidence accumulation.
DOA Measurement Produced by The Subspace Estimator
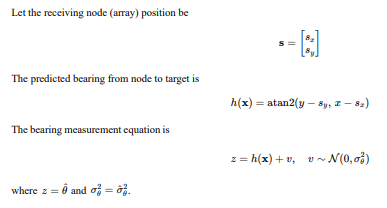
Bearing-Only Observation Model for A Single Receiving Node

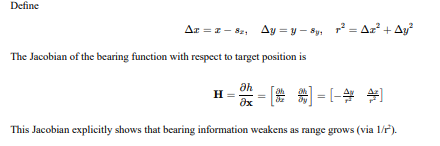
Linearization and Jacobian
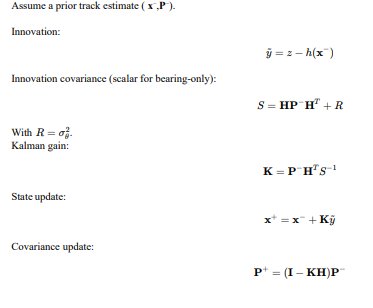
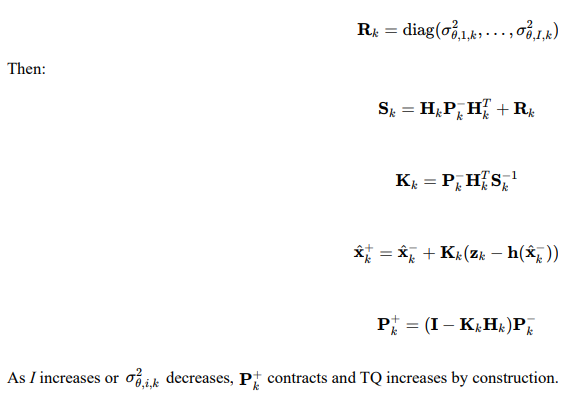
Track-Quality Update via EKF
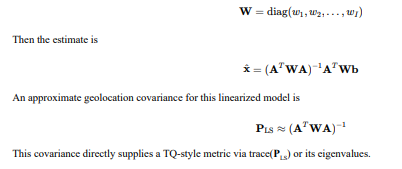
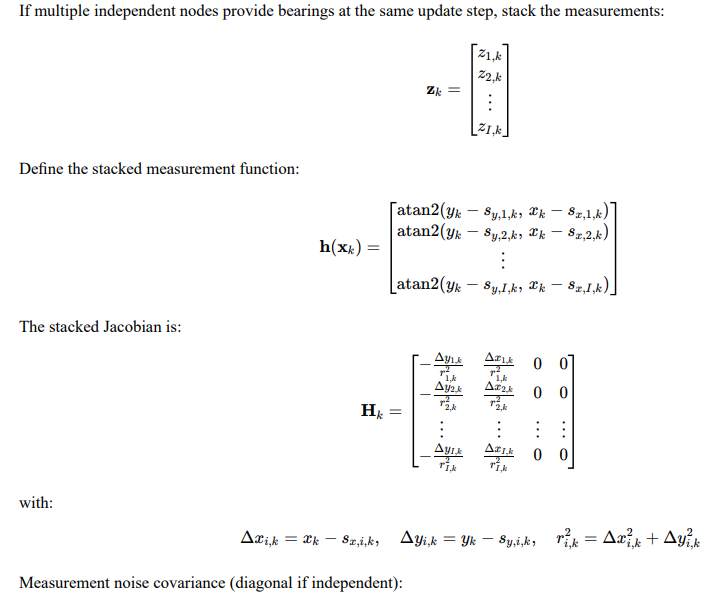
Direct Geolocation from Multiple Bearing Nodes

Target Confidence (TC) as Likelihood Accumulation
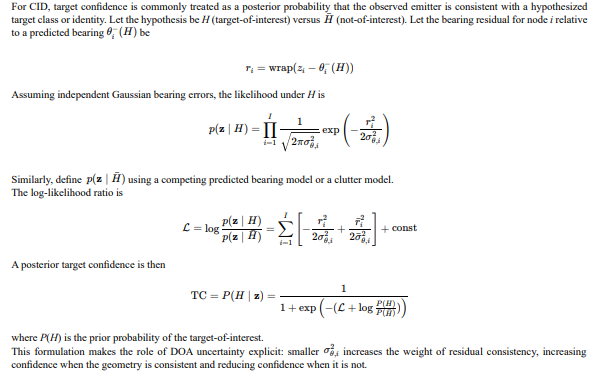
How DOA-Derived Quantities Enter CID Scoring

In CID, subspace DOA provides a measurement model that directly constrains target position through bearing fusion, quantifies track quality through the resulting location covariance, and supports target confidence through likelihood-based consistency scoring in which the same DOA uncertainty terms determine the evidential weight of each observation.
Breakout for TQ
Track Quality (TQ) from Bearing-Only DOA Measurements
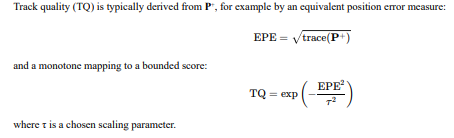
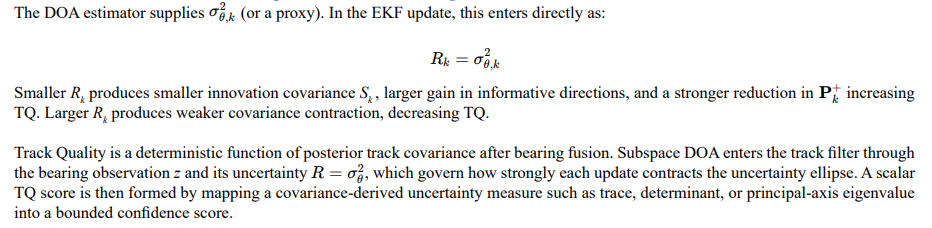
Track Quality (TQ) is treated here as a quantitative summary of track state uncertainty after fusing one or more DOA-derived bearing measurements. The core mathematical object is the posterior track covariance. A scalar TQ score is then derived from that covariance by a monotone mapping that penalizes large uncertainty and rewards concentrated uncertainty ellipses.
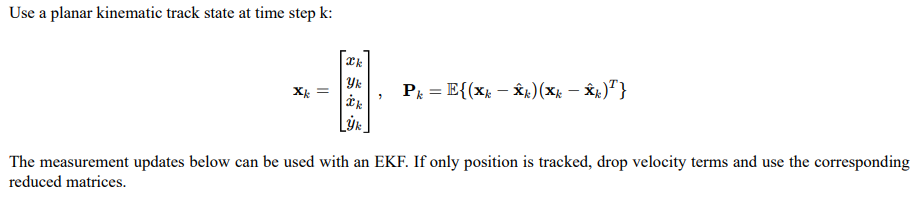
Track state and covariance
Use a planar kinematic track state at time step k:
Bearing Measurement Model (Single Node)
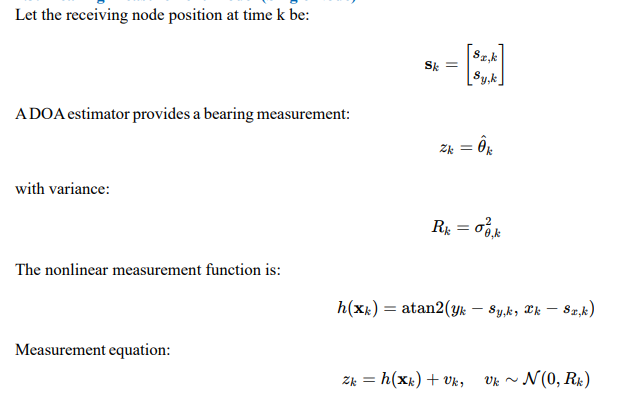
Jacobian
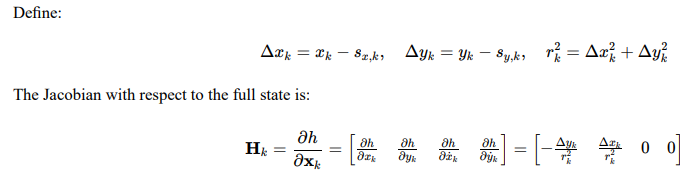
EKF measurement update
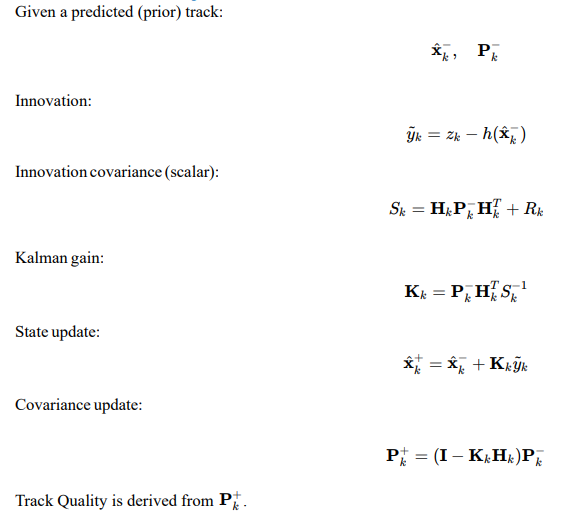
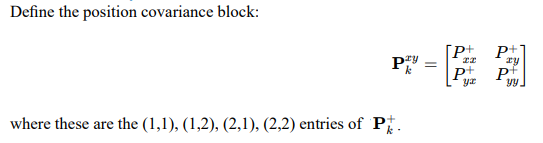
Position-Only Covariance Extracted from Full Covariance
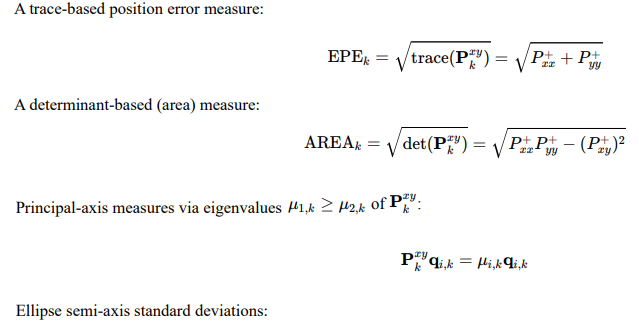
Scalar Uncertainty Measures Used For TQ

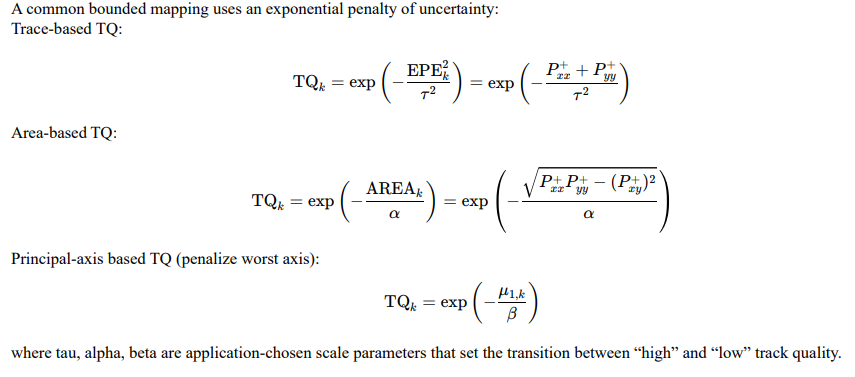
TQ Score as A Bounded Function of Covariance
Multi-Node Bearing Fusion and Its Effect On TQ
TQ Contribution from Pseudospectrum-Derived Bearing Variance
Array Configuration
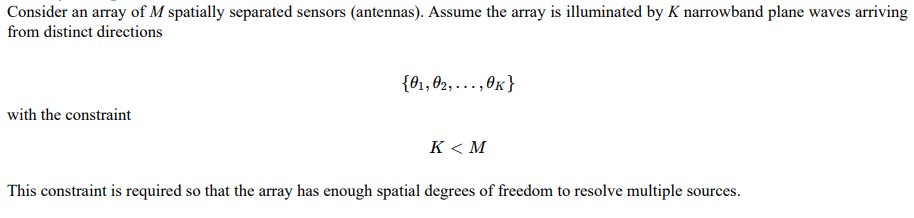
Narrowband Plane-Wave Model

Snapshot Equation
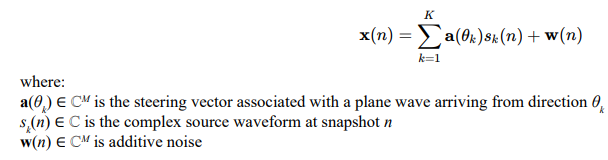
The received snapshot is modeled as the superposition of k sources plus additive noise:
Noise Assumptions

Matrix Form
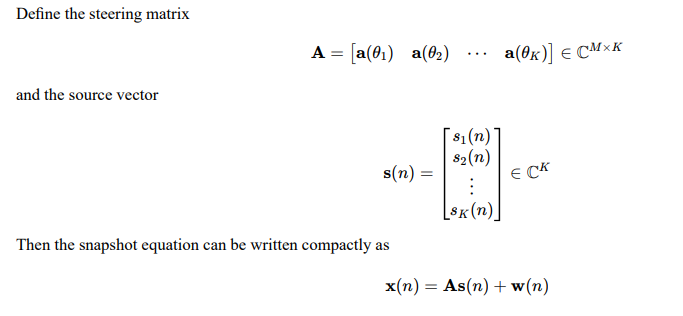
This representation separates deterministic spatial structure (contained in A) from unknown source amplitudes (contained in s(n)). MUSIC exploits this structure by estimating the subspace spanned by the columns of A through the eigenstructure of the spatial covariance matrix.
Notes
The MUSIC problem begins with a narrowband linear array model in which each source direction induces a distinct steering vector. The observed array snapshot is a linear combination of these steering vectors weighted by unknown source waveforms, corrupted by additive noise. The unknown parameters of interest are the arrival angles θ1,…, θK, which are inferred indirectly through covariance structure and subspace orthogonality.
Spatial Covariance Matrix
The spatial covariance matrix captures the second-order statistical structure of the signals received by the antenna array. It is the central object in subspace-based direction-of-arrival estimation methods such as MUSIC, as its eigenstructure encodes the separation between signal and noise components.
Definition
Let x(n) ∈ CM×M denote the array snapshot at time index n. The spatial covariance matrix R ∈ CM×M is defined as the expected outer product of the snapshot with its Hermitian transpose:
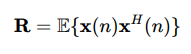
This matrix summarizes average spatial correlations between all sensor pairs.
Substitution of The Signal Model
Substituting the array signal model
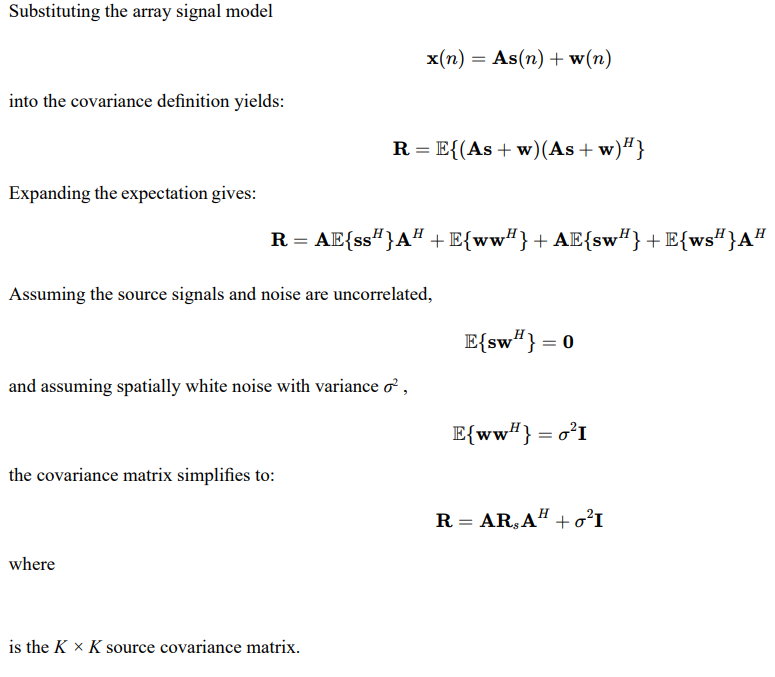
Structure and Interpretation

Sample Covariance Estimate

Asymptotic Behavior
As the number of snapshots N increases,

in the mean-square sense, provided the snapshots are independent and identically distributed. In finite-sample regimes, estimation error perturbs the eigenvalues and eigenvectors, which directly impacts MUSIC performance.
Role in MUSIC
The spatial covariance matrix is the sole input to the eigenstructure-based decomposition used by MUSIC. Its eigenvectors define the signal and noise subspaces, and its eigenvalue separation governs the resolution and robustness of direction estimates.
Notes
The spatial covariance matrix encodes the second-order spatial statistics of array measurements. Under standard assumptions, it decomposes into a low-rank signal component and an isotropic noise component. MUSIC exploits this structure by identifying steering vectors that are orthogonal to the noise subspace derived from the covariance matrix.
Eigenvalue Decomposition of The Covariance Matrix
Let R ∈ CM×M denote the spatial covariance matrix. Its eigenvalue decomposition is given by
Eigenvalue Ordering and Interpretation
Subspace Partitioning
Orthogonality Property
Because U is unitary, the signal and noise subspaces satisfy
![]()
This orthogonality underlies the MUSIC algorithm: steering vectors corresponding to true source directions lie in the signal subspace and therefore have zero projection onto the noise subspace.
Practical Considerations
In finite-sample conditions, the equality λK+1 = ... = λM = σ2 is only approximate. Noise eigenvalues form a cluster rather than a perfect plateau, and eigenvalue spread increases as snapshot count decreases or SNR degrades.
Estimating the number of sources K typically relies on eigenvalue gap inspection or information-theoretic criteria such as AIC or MDL.
Role in MUSIC
The eigenvalue decomposition transforms the covariance matrix into a basis where signal and noise components are explicitly separated. MUSIC uses the noise-subspace eigenvectors to construct a pseudospectrum whose peaks identify directions of arrival with resolution beyond classical beamforming limits.
Notes
Eigenvalue decomposition of the spatial covariance matrix partitions the measurement space into orthogonal signal and noise subspaces. This partitioning enables MUSIC to detect directions of arrival by identifying steering vectors that are orthogonal to the noise subspace, with performance governed by eigenvalue separation and estimation accuracy.
Subspace Orthogonality Principle
The defining theoretical property exploited by the MUSIC algorithm is the orthogonality between the signal and noise subspaces of the spatial covariance matrix. This property provides the mathematical basis for identifying directions of arrival through subspace projection.
Steering vectors and the signal subspace
Under the array signal model, the steering vectors associated with true source directions span the same subspace as the columns of the steering matrix A. Because the signal subspace Us is defined as the eigenspace corresponding to the K largest eigenvalues of the covariance matrix, it follows that each steering vector corresponding to a true source direction lies entirely within this subspace:
Orthogonality to The Noise Subspace
Because the full eigenvector matrix U is unitary, the signal and noise subspaces are orthogonal complements of one another. This implies that any vector lying in the signal subspace must be orthogonal to all vectors spanning the noise subspace:
This condition holds exactly in the idealized case of infinite snapshots, spatially white noise, and perfectly known array geometry. In practical scenarios, the equality is approximate rather than exact.
Geometric Interpretation
Geometrically, MUSIC searches for steering vectors that lie in the null space of the noise subspace projector. For a hypothesized direction θ that matches a true source direction, the corresponding steering vector has no component in the noise subspace. For incorrect directions, the steering vector has a nonzero projection onto the noise subspace.
Role in Pseudospectrum Construction
The MUSIC pseudospectrum is constructed by measuring the energy of the projection of each steering vector onto the noise subspace. Directions for which this projection energy is minimal correspond to candidate directions of arrival. The sharpness of these minima is responsible for the high-resolution properties of MUSIC.
Notes
The subspace orthogonality principle states that steering vectors corresponding to true source directions lie entirely within the signal subspace and are orthogonal to the noise subspace. MUSIC exploits this property by identifying directions whose steering vectors minimize projection onto the noise subspace, forming the mathematical foundation of the algorithm.
MUSIC Pseudospectrum
The MUSIC (Multiple Signal Classification) algorithm estimates directions of arrival by exploiting the structure of the spatial covariance matrix of an antenna array. Rather than forming beams and measuring output power, MUSIC evaluates how well a hypothesized steering vector aligns with the signal subspace of the received data. Directions that are consistent with the observed signal subspace correspond to minima in the projection onto the noise subspace, which appear as sharp peaks in a constructed pseudospectrum.
The method relies on the separation of signal and noise subspaces induced by the eigenstructure of the covariance matrix. This separation enables resolution beyond classical beamforming limits when the underlying assumptions are satisfied.
Array Signal Model
Consider an array of M sensors receiving K narrowband plane waves, with K < M. The received complex baseband signal at snapshot n is modeled as
Spatial Covariance Matrix
Orthogonality Principle

Noise-Subspace Projection
Define the projection of a steering vector onto the noise subspace as
Interpretation
The MUSIC pseudospectrum is not a power spectrum. Instead, it is an inverse consistency metric that highlights directions whose steering vectors align with the signal subspace extracted from the covariance matrix. Its high resolution arises from subspace separation rather than aperture-limited beamforming, with performance governed by signal-to-noise ratio, snapshot count, array calibration accuracy, and source separability.
Notes
MUSIC constructs a pseudospectrum by projecting hypothesized steering vectors onto the noise subspace of the array covariance matrix. Directions of arrival are identified as those that minimize this projection, corresponding to maxima of the reciprocal projection energy. The mathematical core of the method is the eigenstructure-based decomposition of the covariance matrix and the resulting orthogonality between steering vectors and the noise subspace.
Steering Vector for a Uniform Linear Array
A steering vector encodes the relative phase response across an antenna array for a plane wave arriving from a given direction. In MUSIC and related array-processing methods, the steering vector represents the deterministic spatial signature of a hypothesized source direction and is the fundamental object tested against the signal and noise subspaces.
Array Geometry and Assumptions
Consider a uniform linear array (ULA) consisting of M identical antenna elements arranged along a straight line with equal inter-element spacing d. The array is assumed to be:
• Narrowband, so that phase differences across the array can be modeled as constant phase shifts
• In the far field of the source, so that incoming wavefronts are planar
• Calibrated, with identical element responses Let θ denote the angle of arrival measured relative to array broadside (normal to the array axis).
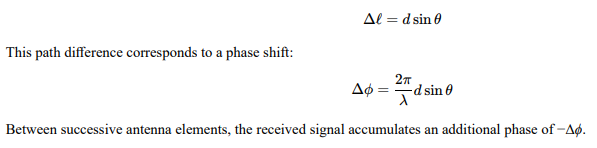
Plane-Wave Phase Model
A monochromatic plane wave with wavelength λ arriving at angle θ has a propagation vector whose projection along the array axis introduces a path-length difference between adjacent elements of:
Steering Vector Definition
The steering vector a(θ) ∈ CM is defined as the collection of relative phase responses across the array, normalized with respect to the first element:
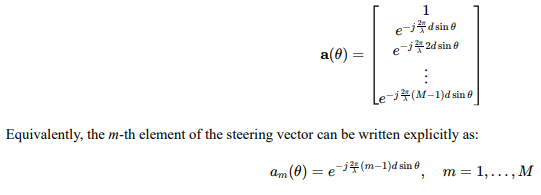
Compact Exponential Form
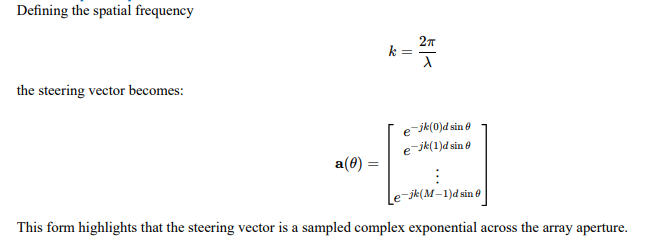
Interpretation in MUSIC
In the MUSIC algorithm, a(θ) represents the expected spatial signature of a source arriving from direction θ. The pseudospectrum evaluates how orthogonal this vector is to the estimated noise subspace:
• If θ matches a true source direction, a(θ) lies in the signal subspace
• If θ does not correspond to a source, a(θ) has a significant projection onto the noise subspace The sharpness of MUSIC peaks depends on how accurately the steering vector models the true array geometry and wavelength.
Practical Considerations
The inter-element spacing is typically chosen as:

to avoid spatial aliasing (grating lobes). Calibration errors, mutual coupling, and element position uncertainty distort the steering vector and directly degrade MUSIC performance.
Notes
For a uniform linear array, the steering vector is a deterministic complex exponential whose phase progression is governed by array spacing, wavelength, and arrival angle. In subspace-based DOA estimation, it serves as the hypothesis tested against the noise subspace to identify directions of arrival with super-resolution accuracy.
Algorithmic Procedure
Compute R^ from array snapshots.
Perform eigenvalue decomposition of R^ .
Estimate K using eigenvalue thresholding or information criteria (AIC/MDL).
Form the noise subspace Un.
Evaluate PMUSIC (θ) over a search grid.
Locate peaks corresponding to estimated directions of arrival.
Key Assumptions
Signals are narrowband relative to array aperture.
Sources are uncorrelated.
Noise is spatially white. Array geometry is known and calibrated.
Number of sensors exceeds number of sources.
Master equation
The preceding derivations are now collected into an explicit form suitable for implementation.
Input Data and Indexing
Let the array have M antenna elements. Let there be N complex baseband snapshots. The raw complex sample from antenna m at snapshot n is
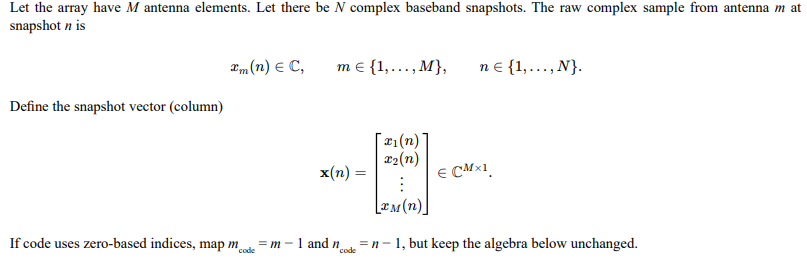
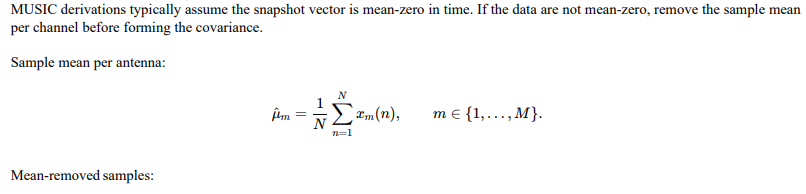
Mean Removal Used by The Covariance Estimator
MUSIC derivations typically assume the snapshot vector is mean-zero in time. If the data are not mean-zero, remove the sample mean per channel before forming the covariance.
Sample mean per antenna:

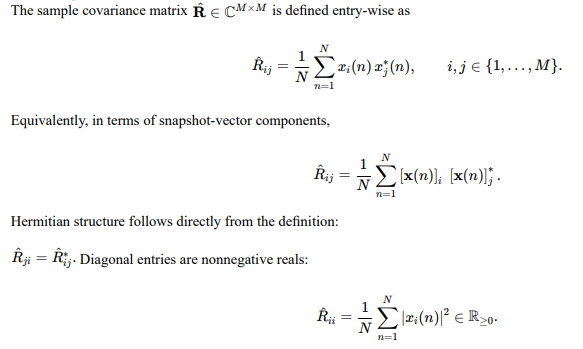
Sample Covariance Matrix Entries
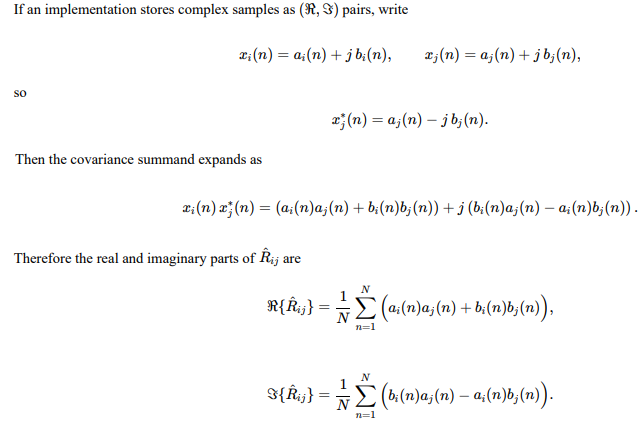
Complex Product Expanded into Real and Imaginary Parts
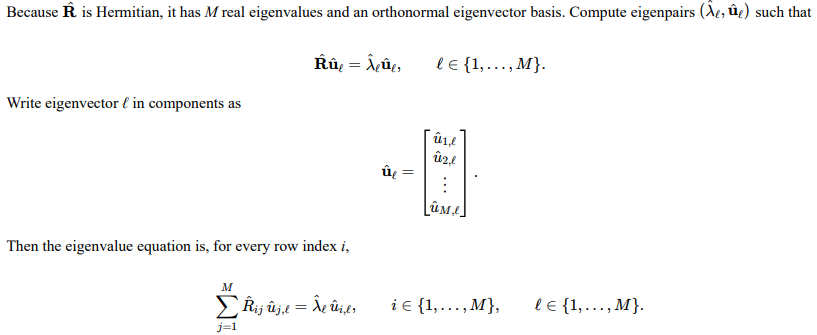
Eigenstructure Extraction
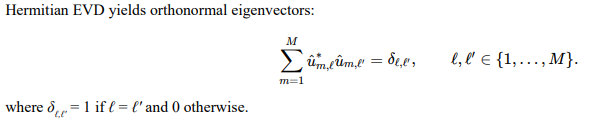
Orthonormality Constraints in Summation Notation
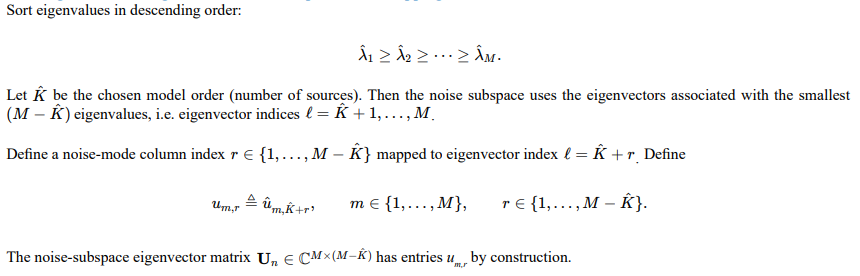
Eigenvalue Sorting and The Noise-Subspace Index Mapping
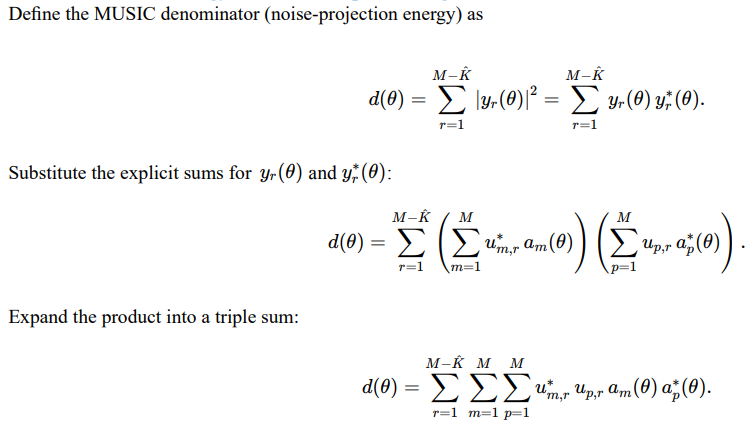
Noise-Subspace Projection and The MUSIC Denominator
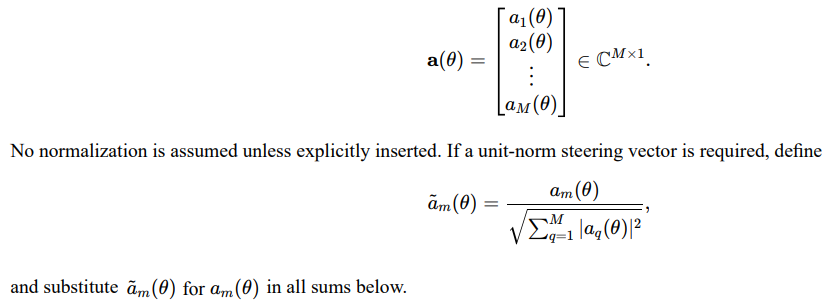
Steering Vector Component Definition
![]()
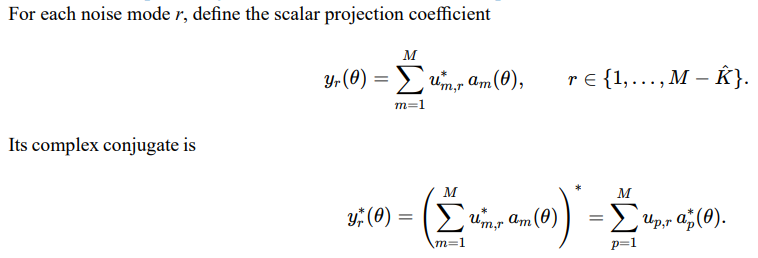
Noise-Subspace Projection Coefficients Written as Explicit Inner Products
Denominator Energy as A Sum of Squared Magnitudes
Real-Valuedness And Numerical Enforcement
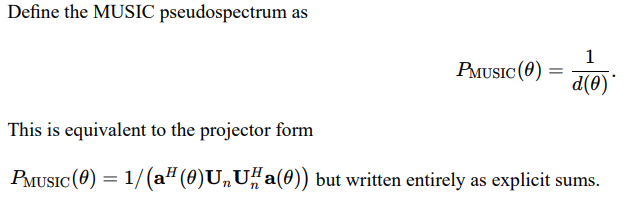
Pseudospectrum Definition

![]()
Pseudospectrum With A Numerical Floor
ULA Steering Vector Component
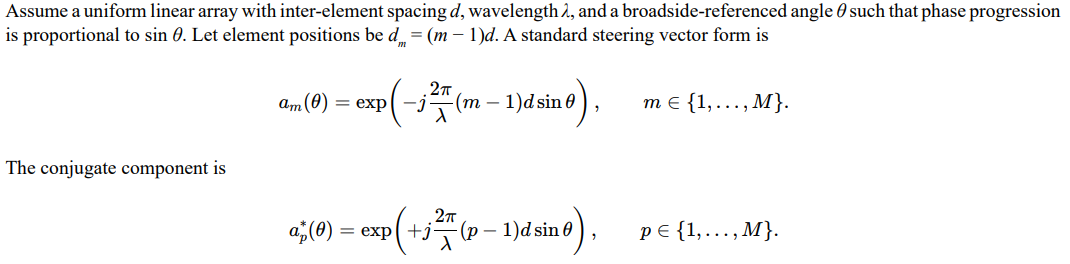
Denominator with ULA substitution

Master Equation for PMUSIC(![]() ) with ULA Substitution
) with ULA Substitution

Scan-Grid Evaluation Written as Explicit Discrete Equations
Discrete Scan Grid Definition
Let the scan grid be the finite set
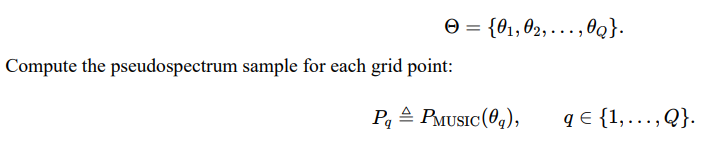
Peak Selection Without Abstraction
A single DOA estimate (single peak) is

Adding in Atmospherics
Geometry and State Variables

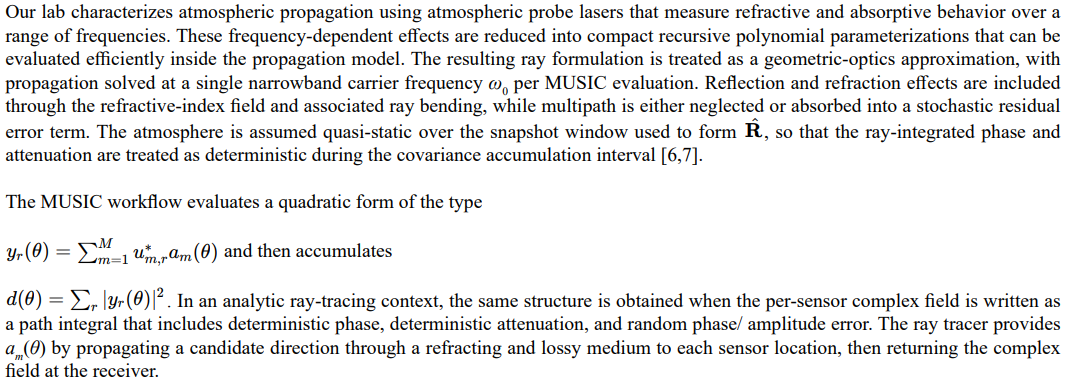
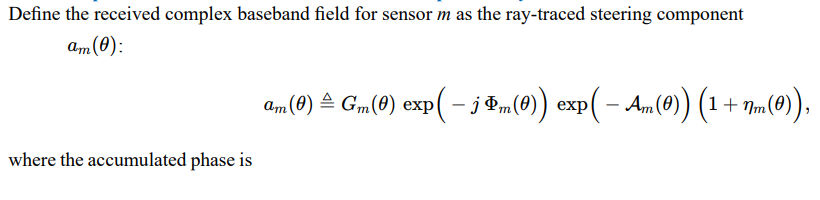
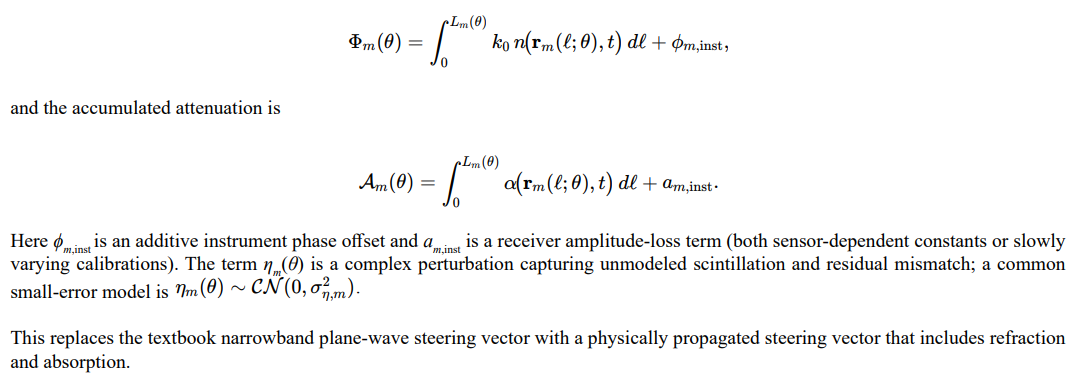
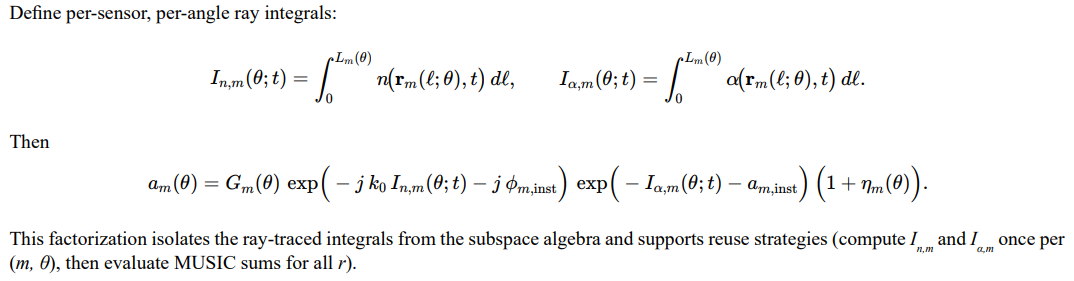
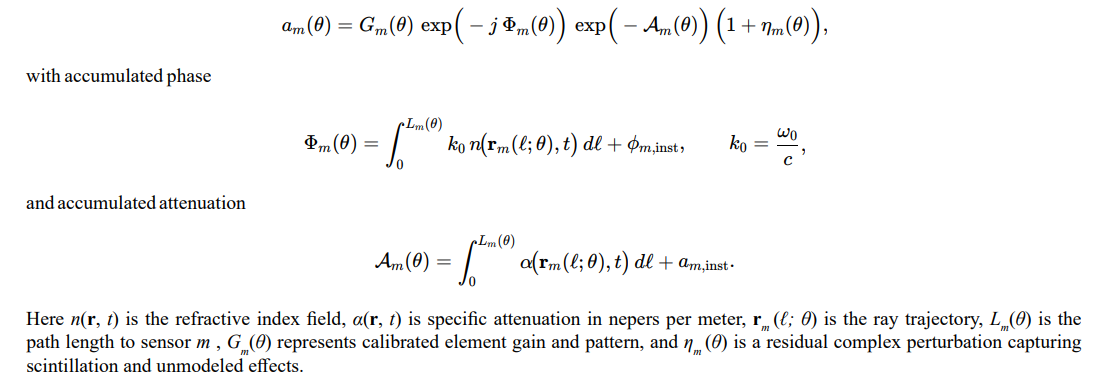
Complex Field at Each Sensor from An Atmospheric Ray Model
Ray Equations with Atmospheric Refraction

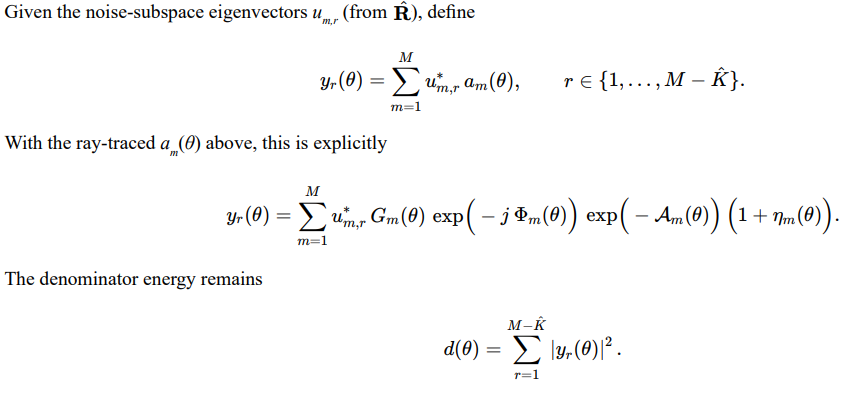
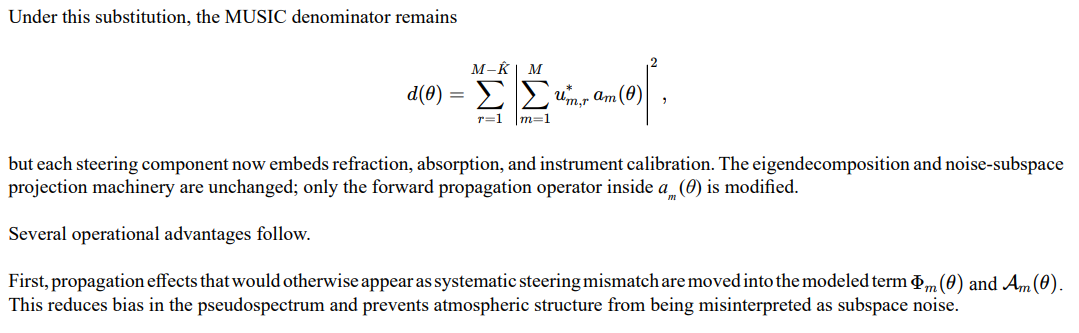
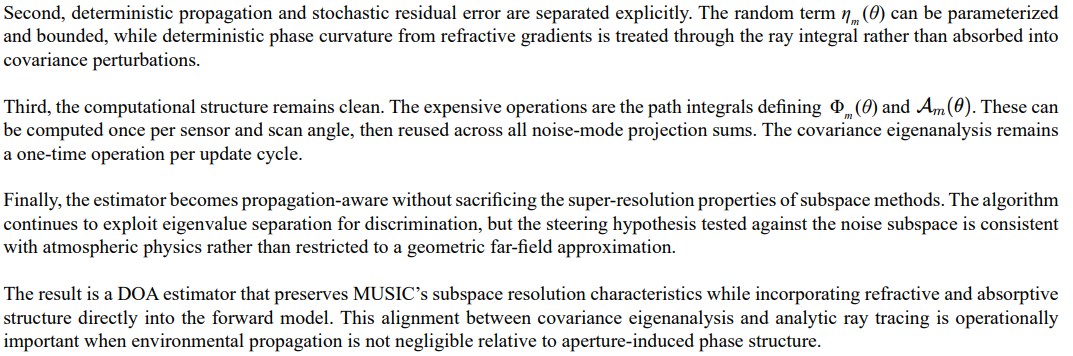
MUSIC Projection with Ray-Traced Steering Components
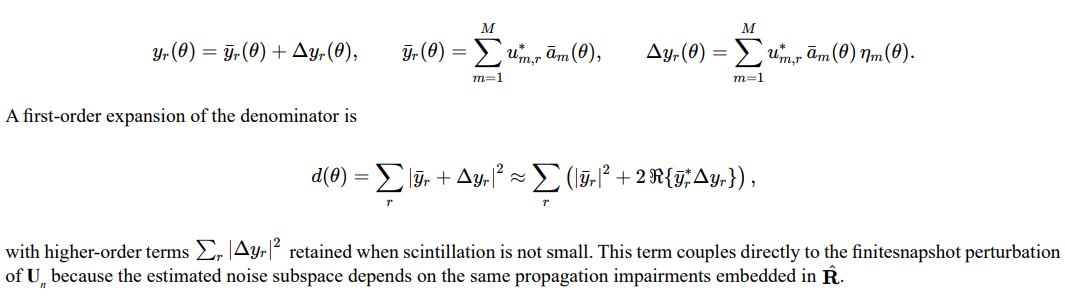
Atmospheric Error Terms and Finite-Sample Coupling

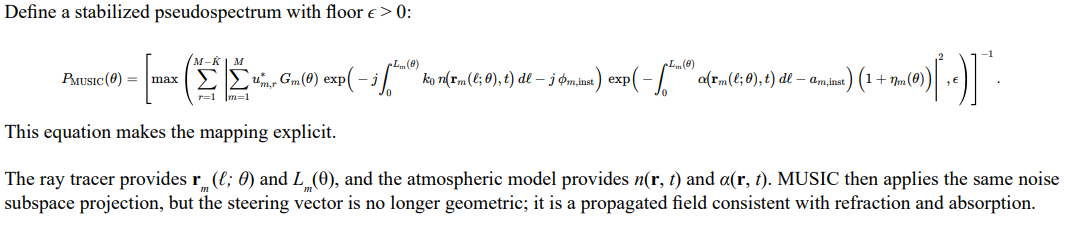
Ray-Traced MUSIC Pseudospectrum With Atmospheric Terms
Implementation Coupling to An Analytic Ray Tracer
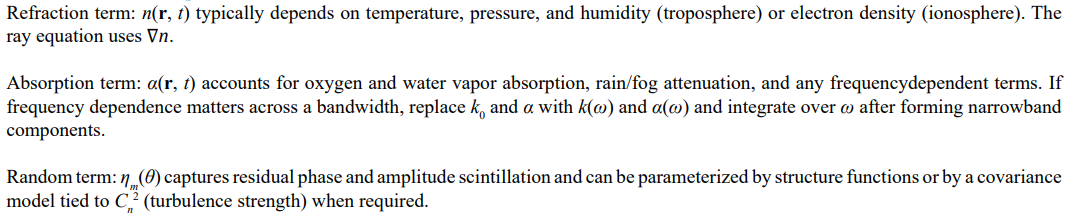
Notes on Atmospheric Content to Include
Computational Complexity
This section analyzes the computational cost of the end-to-end MUSIC evaluation.
Computational Decomposition
The end-to-end cost per update is decomposed into dominant terms as

Covariance Construction Cost
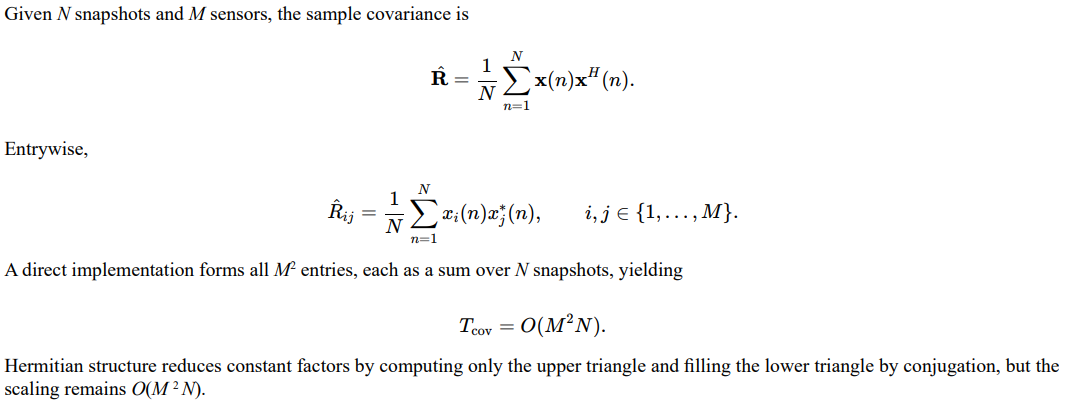
Eigenvalue Decomposition Cost

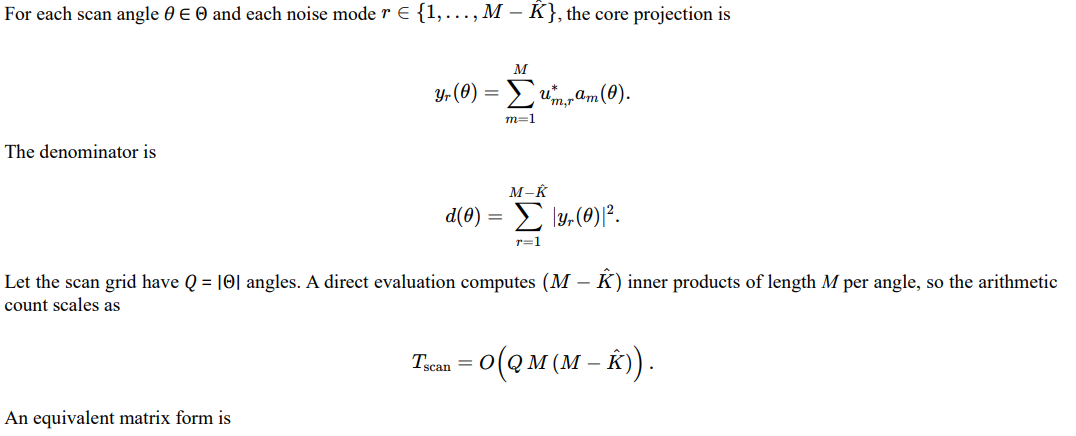
MUSIC Scan Cost with Explicit Inner Products

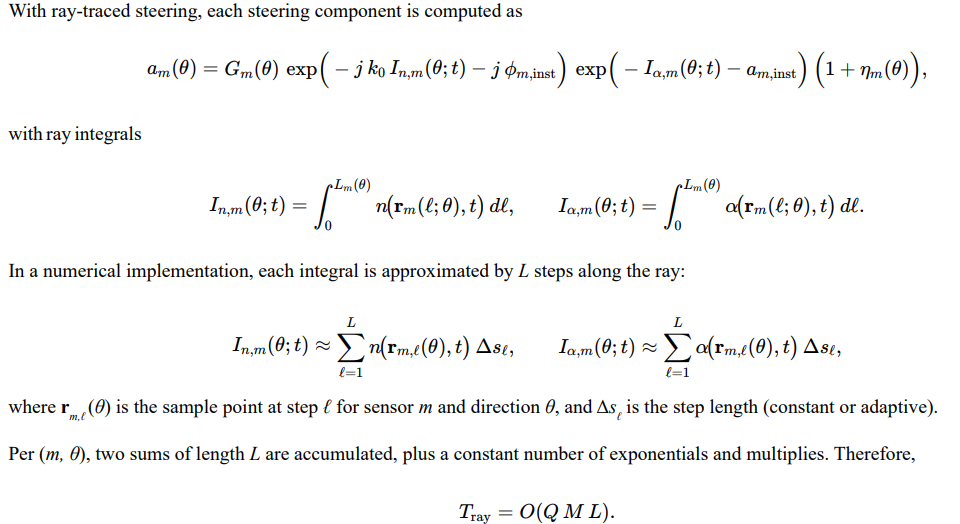
Ray-Traced Steering Cost as Per-Angle, Per-Sensor Integration
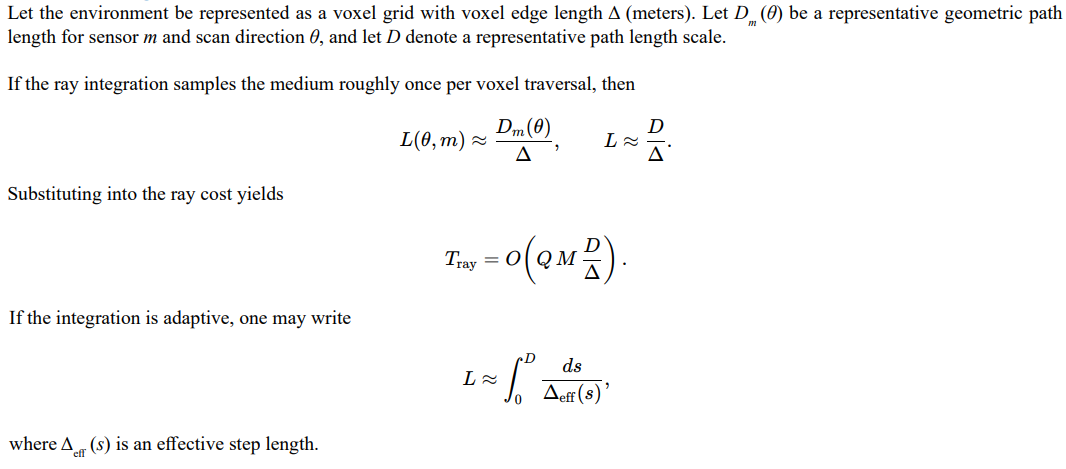
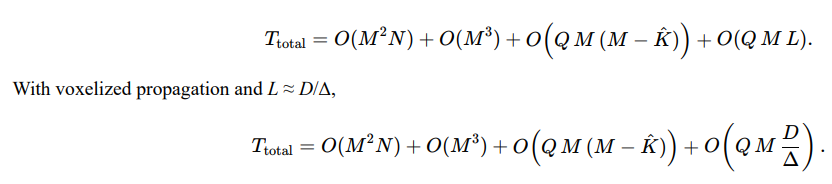
Connecting L to Voxel Resolution and Modeled Area
Full Per-Update Complexity
Collecting dominant terms gives
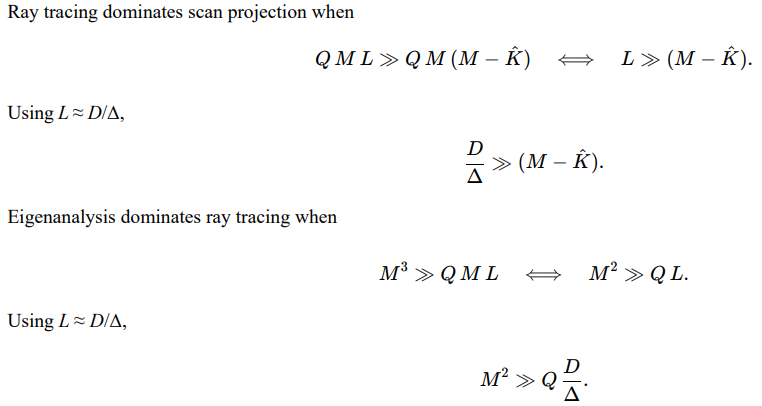
Regime Comparisons
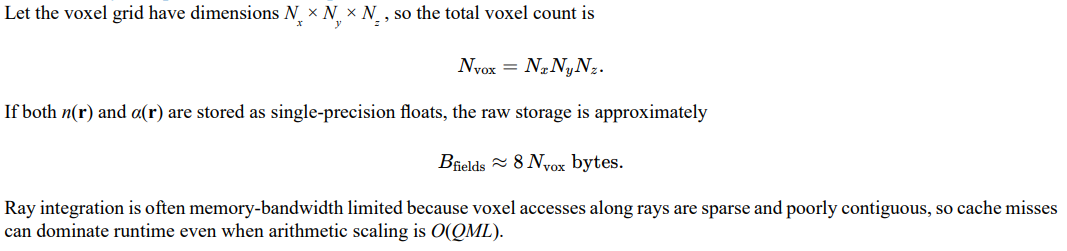
Memory Footprint and Cache Implications for Voxel Fields
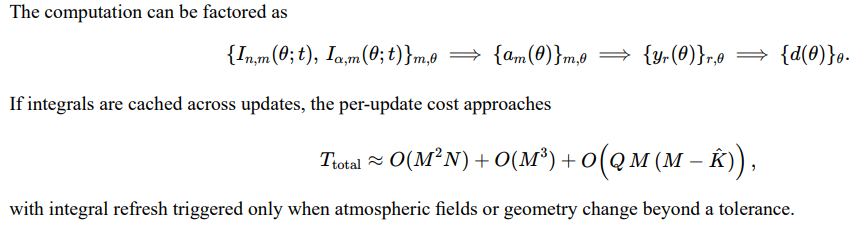
Reuse Structure and Precomputation
Future Work
Future work will focus on controlled validation of the propagation-aware formulation. A primary comparison will evaluate plane-wave MUSIC against ray-traced MUSIC under imposed refractive gradient profiles, including layered and continuously varying n(r) fields derived from probe-laser measurements. The objective is to quantify bearing bias and resolution differences as a function of refractive curvature and vertical gradient magnitude. In addition, the bias and variance of the DOA estimate will be characterized as functions of turbulence strength, parameterized through structure constants and resulting phase perturbations. Sensitivity analysis will also examine peak displacement in the pseudospectrum as a function of modeling error in n(r), explicitly relating steering-vector mismatch to systematic angular shift. These studies will establish the regimes in which ray-traced steering provides measurable improvement over geometric plane-wave assumptions and will bound the residual error attributable to imperfect atmospheric modeling.
Closing Comments
References
- Schmidt, R. (1986). Multiple emitter location and signal parameter estimation. IEEE transactions on antennas and propagation, 34(3), 276-280.
- Pisarenko, V. F. (1973). The retrieval of harmonics from a covariance function. Geophysical Journal of the Royal Astronomical Society, 33(3), 347-366.
- Bienvenu, G., & Kopp, L. (1983). Optimality of high resolution array processing using the eigensystem approach. IEEE Transactions on acoustics, speech, and signal processing, 31(5), 1235-1248.
- Stoica, P., & Nehorai, A. (1989). MUSIC, maximum likelihood, and Cramer-Rao bound. IEEE Transactions on Acoustics, speech, and signal processing, 37(5), 720-741.
- Van Trees, H. L. (2002). Optimum array processing: Part IV of detection, estimation, and modulation theory. John Wiley & Sons.
- Kalman, R. E. (1960). A new approach to linear filtering and prediction problems. Journal of Basic Engineering, 82(1), 35-45.
- Kay, S. M. (1993). Fundamentals of Statistical Signal Processing, Volume I: Estimation Theory. Prentice Hall.