
Journal of Sensor Networks and Data Communications(JSNDC)
ISSN: 2994-6433 | DOI: 10.33140/JSNDC
Impact Factor: 0.98

Research Article - (2025) Volume 5, Issue 1
Cosmic Ray Navigation System (CRoNS) for Autonomous Navigation in GPS-Denied Environments
Received Date: Mar 28, 2025 / Accepted Date: Apr 11, 2025 / Published Date: Apr 30, 2025
Copyright: ©©2025 A. Chilingarian. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Chilingarian, A., Chilingaryan, S., Zazyan, M. (2025). Cosmic Ray Navigation System (CRoNS) for Autonomous Navigation in GPS-Denied Environments. J Sen Net Data Comm, 5(1), 01-07.
Abstract
In an era where Position, Navigation, and Timing (PNT) systems are integral to our technological infrastructure, the increasing prevalence of severe space weather events and the advent of deliberate disruptions such as GPS jamming and spoofing pose significant risks. These challenges are underscored by recent military operations in Ukraine, highlighting the vulnerability of Global Navigation Satellite Systems (GNSS). In response, we introduce the Cosmic Ray Navigation System (CRoNS). This innovative and resilient alternative utilizes cosmic ray showers for high-precision navigation in environments where GNSS is compromised or unavailable. CRoNS capitalizes on an economical, distributed network of compact muon/electron sensors deployed across urban landscapes and integrated into mobile devices. These sensors continuously refine the parameters of the coordinate system, ensuring that adaptive and self-improving PNT services provide a significant advantage over static GNSS. They constantly monitor particle flux from extensive air showers (EASs) triggered by the stable galactic cosmic ray (GCR) flux entering Earth's atmosphere. Robots and vehicles equipped with CRoNS can autonomously navigate surface landscapes and underground, cross-referencing measured particle densities against the continuously updated reference system.
Keywords
Local Positioning Systems, Extensive Air Showers, Networks of Muon Sensors
Introduction
In the intricate weave of modern technology, the Global Navigation Satellite System (GNSS) is indispensable, providing high-accuracy positioning critical for numerous autonomous and precision applications. The resilience of GNSS systems is vital, particularly in the face of severe space weather events and other threats that can compromise signal integrity and satellite functionality. The recent exposure of GNSS vulnerabilities to GPS jamming and spoofing, as observed in military operations in Ukraine, underscores the urgent need for alternative, resilient navigation solutions [1]. Cybersecurity threats, such as attacks on energy grids, transportation networks, and government databases, have demonstrated how digital and communication networks face numerous weaknesses that can disrupt power supply and everyday life. Hurricanes, wildfires, and earthquakes can harm satellite ground stations and other critical infrastructure. Space weather events, such as solar energetic protons and geomagnetic storms, interfere with the magnetosphere and satellite infrastructure, leading to reduced accuracy or a complete loss of positioning and timing data.
Recent extreme geomagnetic storms of the 25th solar activity cycle further highlight the necessity for autonomous navigation systems [2,3]. The Internet of Things increases our dependency on precise and reliable timing provided by GNSS. Any disruption in GNSS services could have cascading effects on urban transportation and critical health care services. GPS is a key navigation tool in aviation, replacing expensive ground infrastructure for guiding planes. Thus, robust PNT solutions have become more crucial than ever to safeguard national security, economic stability, and public safety. In response to these vulnerabilities, the US, UK, and European governments-initiated programs in 2023 to create sovereign Position, Navigation, and Timing (PNT) frameworks [4,5]. Growing government investments in GNSS-independent PNT solutions are designed to support Critical National Infrastructure (CNI) and serve as reliable backups for key services like defense and emergency responses during the absence, degradation, or disruption of GNSS services
Various alternative navigation methods are being explored to ensure uninterrupted navigation capabilities, particularly in the face of GNSS compromise due to severe space weather or anti- satellite weaponry. While not yet fully realized and tested, these alternatives offer crucial navigational functions to maintain operational capability in the face of challenges such as signal interference, jamming, or environmental obstacles:
• Inertial Navigation Systems (INS): Utilizing accelerometers and gyroscopes, INS calculates position and orientation from speed and movement direction. Common in aircraft, submarines, and spacecraft, they boast immunity to signal jamming due to their independence from external signals.
• Radio Navigation Systems: Precursors to GPS, systems like LORAN and VOR used radio signals to triangulate position. Although many have been decommissioned, they're now being reconsidered as potential GPS backups.
• Celestial Navigation: An age-old art employed by sailors that uses celestial bodies to determine one's position.
• Dead Reckoning is a traditional method for estimating one's current position from a known location by tracking speed, time, and direction.
• Terrestrial Navigation: Relies on landmarks, topographical maps, and compasses, particularly for land navigation.
• Optical Aids: Leverage advanced systems to automate the tracking of celestial bodies for navigation.
• Quantum Navigation: An emerging technology using quantum sensors to provide precise, GPS-independent navigation by measuring acceleration and gravitational fields.
• Muometric positioning and navigation techniques based on the time-offlight of relativistic cosmic-ray muons between reference detectors and the receiver detector.
Each method has its advantages and limitations. Combining these systems in military and other critical contexts is common to ensure redundancy and resilience. Quantum navigation using rubidium atoms' Bose-Einstein condensate (BEC) can be developed as a highly sensitive and precise sensor. The atoms in this state of matter behave coherently, moving synchronously, and can be controlled with extreme precision. By manipulating the BEC using magnetic fields and laser beams, researchers can create interference patterns extremely sensitive to external forces, such as changes in gravity or acceleration. These interference patterns can measure the device's rotation, acceleration, and gravitational field in which the condensate is positioned. The device can accurately determine its coordinates and orientation in space by comparing the interference patterns generated by the BEC with a library of reference patterns. This allows for highly precise navigation without the need for traditional GPS signals, making quantum navigation a promising technology for applications in space exploration, autonomous vehicles, and other fields where precise navigation is crucial. However, achieving the Bose-Einstein condensate state requires cooling atoms to temperatures close to absolute zero (-273°C). The process demands high-precision equipment for cooling, manipulating, and maintaining the condensate, which can be difficult to operate and maintain. BECs are highly sensitive to external disturbances such as emerging magnetic fields (of technological or Solar nature), temperature fluctuations, and vibrations. This sensitivity can make maintaining stable conditions for accurate measurements challenging, especially in mobile environments like spacecraft or autonomous vehicles. The condensate must be isolated from external influences, requiring advanced shielding and isolation techniques, which add to the system's complexity and cost. The method relies on analyzing interference patterns, which can be difficult to interpret accurately. Small errors in measurement or environmental changes can lead to significant deviations in results. The need for precise and stable conditions may limit the equipment's portability, making it less practical for certain applications.
Navigation and positioning with cosmic ray muons stand out due to their stability, simplicity, and well-known measurements and data analysis techniques. Its capability was underscored by a Japanese research team deploying a sensor array in the Tokyo Bay Aqua-Line service tunnel, 45 meters below sea level [6,7]. They successfully used muometric to image a cyclone's vertical profile, revealing variations in density and providing insights that could improve cyclone predictions. Muometric's potential for enhancing autonomous navigation in robots and vehicles, especially in GPS-denied environments, marks it as a significant advancement for resource exploration and geoscientific understanding. The Cosmic Ray Navigation System (CRoNS) significantly enlarges muometric possibilities. It is based not on single muon bundles but on Extensive Air Showers, a coherent flux of electrons, gamma rays, neutrons, hadrons, and muons continuously bombarding the Earth’s surface [8].
CroNS has the potential to provide continuous PNT services within a coordinate system that is continually updated by registering EAS flux. The techniques employed have been known for 80 years. With modern advancements in compact, cost- effective muon detectors, CRoNS is not a theoretical concept but a practical, scalable alternative to conventional GNSS dependent PNT systems. CRoNS leverages the muon/electronic component of EASs generated by high-energy galactic protons with energies ranging from 10 to 1000 TeV. Thus, rather than using single muons as in muometry, a correlated variety of muons produced by the interaction of high-energy GCRs will be utilized. Muons can penetrate buildings and disperse up to 100 meters from the shower axes, necessitating hundreds of muon detectors across urban areas. By incorporating particle sensors on mobile devices, CRoNS offers a robust framework for accurate distance determination from EAS axes, establishing a new method as a cornerstone of future navigational technologies. The services will be extremely robust, as nothing can impede the EAS flux. In contrast to quantum navigation, which requires ultra-cold conditions and is highly sensitive to environmental disturbances, or muometric methods that rely on single-muon detection, CRoNS uniquely offers a continuous, interference-free, GNSS-independent navigation solution, leveraging the naturally occurring, ever-present EAS flux to ensure resilience in urban and remote environments alike.
Idea of Cosmic Ray Navigation System (CRoNS)
Utilizing individual EAS particles for precise positioning poses challenges due to the significant random noise. For instance, archaeological applications have necessitated prolonged exposure to large sensors to detect underground cavities [9]. We propose reducing the noise by continuously estimating numerous EAS axes with networks of muon/electron detectors. Although achieving high precision with a single EAS is not feasible, we can ascertain the radius around the shower axes when a vehicle is in position. High-energy showers (>0.1 PeV) occur frequently and impact large areas. EAS particles arrive within tens of nanoseconds and are typically registered within a millisecond window, thereby recovering shower characteristics. The approximation of the Lateral Distribution Function (LDF), measured by a dense network of muon/electron detectors, facilitates the derivation of five critical shower parameters: the coordinates of shower axes on the ground, incidence angles, and the altitude of the primary particle's initial interaction with atmospheric nuclei [10]. The accuracy of shower axis determination is influenced by the detector array's density and the primary particle's energy. The continuous and uniform arrival of EASs provides a stream of coordinates with time stamps from an atomic clock, forming a reference coordinate system for mobile vehicle positioning. Leveraging multiple EAS events enhances locational accuracy.
CRoNS offers two modalities for surface and underground positioning. For surface applications, a mobile device's distance from the shower axes is directly deduced by comparing the measured particle density on the moving device with the LDF recovered from the distributed detector network. Subterranean positioning, however, involves estimating the expected particle density after modeling EAS muon propagation through the soil to the target depth. The underground detector's measured muon density is then compared with the estimated LDF. This method does not necessitate a network of underground muon detectors; rather, muon density data from mobile devices can be transmitted to the AI-governed data acquisition system via HF radio, ensuring connectivity up to approximately 10 m depths. Integrating Neural network models into EAS physics is now dominant, starting from a successful milestone in 2003 [11]. A robot or vehicle equipped with a muon/electron detector can determine its position within the global coordinate system by correlating measured muon/electron densities with those anticipated from registered EASs. Synthesizing data from the continuous cosmic ray flux substantially enhances positioning accuracy. CRoNS is supported by a distributed network of cost-effective, compact particle sensors strategically positioned over large surveillance areas. The feasibility of integrating CMOS sensors within mobile phones for global EAS monitoring is also an option [12]. Multiple EASs affect vast cityscapes, allowing them to be tracked and establishing a reference system that enables each mobile counter to determine its precise location. This network of navigational sentinels continuously surveys the EAS particle flux, directing the collected data into a central AI-driven unit that quickly computes EAS parameters. These parameters, which include the coordinates of axes, angles of inclination, and the primary particle's energy, merge into a comprehensive and dynamically updated reference coordinate system.
Networks of Muon Detectors on the Earth’s Surface
Microfabricated radiation detectors, or integrated circuit radiation sensors, are at the forefront of particle detection technology. These miniaturized devices can identify the presence and characteristics of ionizing radiation. Utilizing advanced micro and nanofabrication techniques akin to those employed in computer chip production, they offer the potential for reduced production costs and seamless integration with other electronic circuits. This integration facilitates functions like synchronization and data transmission directly to the central processing unit (CPU). Constructed from materials such as silicon or germanium, they operate by generating electron-hole pairs in response to ionizing radiation exposure. The quantity of these pairs correlates with the energy of the radiation particle, providing a measure of its intensity. Alternative designs incorporate scintillator materials that emit light upon radiation exposure, which is converted into an electrical signal through a photodetector. A prime exemplar of this technology is the Timepix chip, a compact, low-power radiation monitoring device equipped with a 300-micron thick silicon sensor boasting a signal threshold of 8 keV/pixel [13]. The sensor, with its 256 x 256-pixel matrix, covers a total area of 14 x 14 mm² (equivalent to 2 cm²) and can register event count rates up to 10¹¹ count/(cm² s), rendering it an ideal candidate for distributed particle detection networks.
The innovative concept of harnessing smartphones for Extensive Air Shower (EAS) detection hinges on the principle that when high-energy particles impact the sensors within these devices, they effectively transform smartphones into a widespread network of cosmic ray detectors. By leveraging smartphones' precise location and timestamp capabilities, isolating particle counts associated with EASs becomes feasible, thereby furnishing valuable data for the real-time recovery of EAS parameters. However, actualizing such a project presents notable challenges, such as mobilizing a substantial participant base and crafting sophisticated software to discern muon/electrons from individual EASs.
The CRAYFIS (Cosmic RAYs Found in Smartphones) initiative is a groundbreaking endeavor to exploit smartphones' ubiquity to establish an extensive cosmic ray observatory [12]. The initiative seeks to tap into the sensitivity of CMOS sensors in smartphone cameras to high-energy particles, thus enabling the detection of cosmic rays. This approach envisions a global network that could surpass the area coverage of traditional cosmic ray observatories. Furthermore, the project represents a significant contribution to citizen science, empowering individuals to partake in scientific discovery with devices that are part of their everyday lives.
Simulations of the Expected Muon Flux on the Earth’s Surface and Underground
Muon species of cosmic rays, resulting from interactions of GCR with the Earth's atmosphere, are detected in significant quantities at the Earth’s surface. Figure 1 from shows the dependence of light nuclei flux (protons and alpha particles) on energy [14]. Notable discrepancies in spectral slopes have been observed across different detection methods, including balloon, satellite, and surface array data. These differences can be attributed to the varied experimental techniques, atmospheric effects, a deficit of data at energies above 100 TeV, and inadequate data collection for surface arrays at energies below 500 TeV. Despite these variations, a general concordance can be seen in the energy spectra recorded by the HAWC (blue circles) and the high-altitude MAKET-ANI arrays (black squares), particularly in the energy range of 5×10¹³ to 10¹Ã¢Âµ eV [11,15].
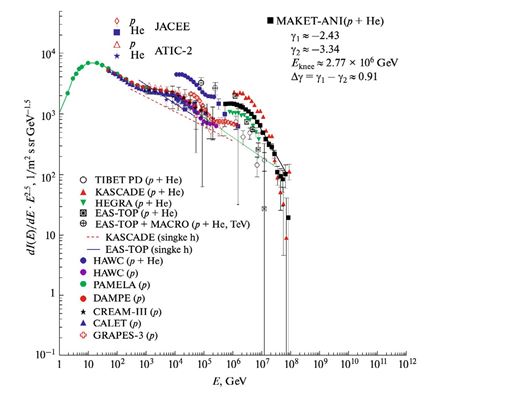
Figure 1: Primary light nuclei (p+He) spectra measured by the MAKET-ANI detector in comparison with the spectra reported by KASCADE, EAS-TOP, HEGRA, EAS- TOP+MACRO, TIBET experiments (all spectra were obtained with CORSIKA QGSJet01model) [11]. The direct balloon measurements by ATIC-2 and JACEE are related to 102 - 105 GeV energies. The modern experiments HAWC, PAMELA, DAMPE, CREAM I-III, CALET, and GRAPES-3 are included as well [15-20].
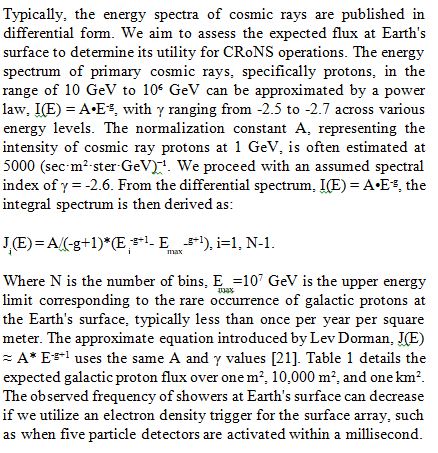
Typically, the energy spectra of cosmic rays are published in differential form. We aim to assess the expected flux at Earth's surface to determine its utility for CRoNS operations. The energy spectrum of primary cosmic rays, specifically protons, in the range of 10 GeV to 10ⶠGeV can be approximated by a power law, I(E) = A•E-g, with γ ranging from -2.5 to -2.7 across various energy levels. The normalization constant A, representing the intensity of cosmic ray protons at 1 GeV, is often estimated at 5000 (sec•m²•ster•GeV)⻹. We proceed with an assumed spectral index of γ = -2.6. From the differential spectrum, I(E) = A•E-g, the integral spectrum is then derived as:
Electrons rapidly attenuate in dense atmospheres, so only a small fraction of primary protons with energies up to 100 TeV will generate electron showers that reach the surface. However, as part of EASs, muons have a higher probability of reaching the surface in substantial quantities. To assess the muon rate expected for CRoNS applications, we simulated particle showers over New York City and traced the resulting muons to the surface.
Utilizing the CORSIKA simulation code, incorporating the QGSJETII-04 and UrQMD models for strong interactions [22]. EASs were initiated by vertical protons. Muons were tracked until their energy dropped below 10 MeV. Figure 2 illustrates that a significant number of muons reach the ground. With 500 muons impacting an area of 10,000 m² and detected within one millisecond, there is potential for navigation usage. As indicated in Table 1, we expect approximately 156 such muon showers per second, with the number from 1000 TeV protons being considerably fewer (around 0.1) but with a muon count exceeding 10,000. For a larger area of 1 km², the shower frequency increases to 10 per second. Muon showers from intermediate energies will be between these two extreme cases.
|
Energy (GeV) |
Dorman g = -2.6 |
Ntotal(>E) (m−2 s−1) |
Count Rate (10,000 m²) |
Count Rate (1 km²) |
|
1 |
62800 |
39270 |
3.9×108 |
3.9×1010 |
|
10 |
1557 |
986 |
9.9×106 |
9.9×108 |
|
100 |
39 |
25 |
2.5×105 |
2.5×107 |
|
1,000 |
1 |
0.62 |
6.2×103 |
6.2×105 |
|
10,000 |
0.025 |
0.016 |
156 |
1.56×104 |
|
100,000 |
0.0006 |
0.0004 |
3.93 |
393 |
|
1,000,000 |
1.5*10−5 |
10−5 |
0.1 |
1 |
Table 1: The expected number of primary protons hitting the Earth’s atmosphere per second at 1m2, 10,000 m2, and 1 km2. In the second column, we post the approximate values obtained with the equation introduced in (Dorman) [21].
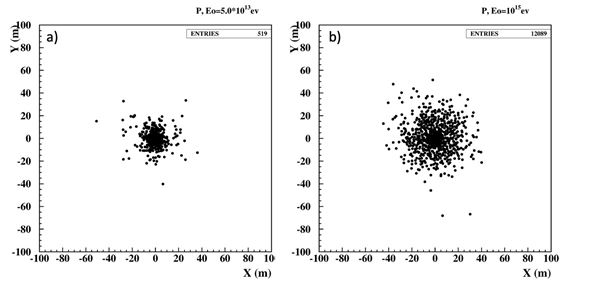
Figure 2: The Distribution of Muons Hitting the Ground from the Low-Energy Primary Proton, 10 TeV, a) and 1000 TeV, b).
Figure 3 illustrates the lateral distribution of muons at sea level and 15 m below ground. The spread of muons from the extensive air shower (EAS) initiated by a 10 TeV primary proton typicallyfalls within a 50 m radius. In contrast, the spread from a high- energy proton can extend up to 100 m. For underground detection, the lateral distribution was reduced by approximately half.
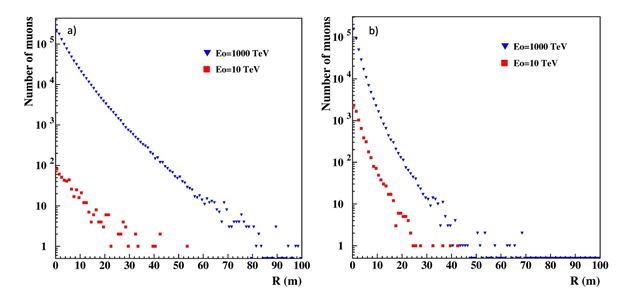
Figure 3: The Lateral Distribution of Muons with Energies above 10 MeV from Primary Protons with Energies 1000 TeV, blue, and 10 TeV, red. One hundred showers for each primary energy were simulated. a) on the Earth’s surface; b) under 15 m of soil and concrete (minimal energy of muons 5 GeV).
Figure 4 shows the histogram of muons in each EAS for 10 and 1000 TeV energies on the Earth’s surface and underground. As expected, the underground muons' distribution is much more compact (E > 5 GeV).
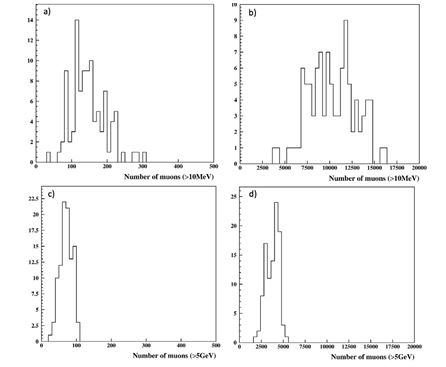
Figure 4: The Distribution of Muons from High and Low-Energy Primary Protons at Sea Level (a and b) and underground (c and d).
Implementation and Technical Solutions
The stable galactic protons and nuclei flux provide enough secondary muons to recover particle type, energy, and shower axes. Shower parameters will be continuously recovered and stored for further comparison with the muon density detected on moving vehicles. Currently, no technological measures are available to disrupt, modulate, or alter the galactic cosmic ray flux. Monitoring the showers will provide a continuously renewed map of reference points for vehicle navigation. The scheme of development of CRoNS navigation can be looked at as follows:
Sensor Deployment and Network Setup
• Locate Muon/electron Sensors: Place muon/electron sensors in areas selected for surveillance.
• Wireless Connection: Install electronics for wireless communication, linking all sensors to a central processor by WiFi. Connect all detectors within a unified coordinate system.
• Synchronization: Synchronize all sensors with microsecond accuracy.
Data Preparation
• Simulation Library: Prepare a library of Extensive Air Shower (EAS) developments in the atmosphere using the CORSIKA code for various primary proton energies and angles of incidence. This library will store muon coordinates and energies at specific locations.
• Detector Simulation: Use the GEANT4 package to introduce detector accuracies and all methodological errors, obtaining muon coordinates as measured by the detectors.
Neural Network Training
• Training: Train a neural network using the ANI package or other modern AI packages with simulation trials to recover the shower's energy and coordinates based on registered muons and electrons [23].
Shower Parameter Recovery
• A central AI-driven computational system synthesizes data from the muon sensors and uses simulation libraries to estimate the EAS core in the reference coordinate system and other EAS parameters.
Mobile Vehicle Navigation
• The muon LDF is calculated for each registered EAS.
• By comparing the LDF with the muon measurements from the mobile vehicle, the vehicle's distance from the shower axes is estimated.
• The vehicle's coordinates are determined using several registered EASs and the estimated distances to the shower axes.
• The coordinates are continuously displayed to the driver and operator.
Additional Considerations and Challenge
• Accuracy and Synchronization: Ensuring high accuracy and synchronization among all sensors is crucial for reliable navigation.
• Data Processing: The system requires robust data processing capabilities to handle the real-time data from muon detectors and recover shower parameters.
Conclusion
During violent solar flares or upcoming wars, satellite-based systems like GPS might be compromised or unavailable due to anti-satellite weaponry. The alternatives can include a scalable Cosmic Ray Navigation System (CRoNS) to create a dynamic local navigation system spanning big cities and even countries. The distributed system of cheap and compact muon/electron sensors will be located on roofs of tall buildings and continuously measure EASs. EASs, containing thousands to millions of particles, will trigger the electronics to store particle densities from all sensors. A central AI-driven processing unit will then rapidly estimate shower axes, declination angles, and primary particle energy, continuously refining the navigation grid. An advantage of the proposed system is the possibility of the autonomous navigation of vehicles and robots in environments where GPS signals are hard to receive. Robots and vehicles equipped with CRoNS-enhanced particle detectors can seamlessly navigate through dense urban environments and underground spaces by cross-referencing measured particle densities against the established reference system. In an age where the fabric of global navigation is under threat from the specter of technological warfare, a revolutionary navigation method immune to the vulnerabilities of satellite-based systems is not just a boon but a necessity. The CRoNS emerges as a vanguard of this new era, offering a dynamic and robust navigation system crafted to withstand modern combat environments' challenges.
References
1. Goward, D.A. (2023) Romania GPS problems can extend far inland.
2. Chilingarian, A., Karapetyan, T., Sargsyan, B., Zazyan, M., Knapp, J., Walter, M., & Rehm, T. (2024). Increase in the count rates of ground-based cosmic-ray detectors caused by the heliomagnetic disturbance on 5 November 2023. Europhysics Letters, 146(2), 24001.
3. Chilingarian, A., Karapetyan, T., Sargsyan, B., Asatryan, K., & Gabaryan, G. (2024). Influence of magnetosphere disturbances on particle fluxes measured by ground-based detectors. Europhysics Letters, 148(1), 19001.
4. Department for Science, Innovation and Technology (2023) Critical services to be better protected from satellite data disruptions through new Position Navigation and Timing framework.
5. Bonenberg, L., Motella, B., & Fortuny, G. J. (2023). Assessing Alternative Positioning, Navigation and Timing Technologies for Potential Deployment in the EU.
6. Tanaka, H. K., Gluyas, J., Holma, M., Joutsenvaara, J., Kuusiniemi, P., Leone, G., ... & Yokota, Y. (2022). Atmospheric muography for imaging and monitoring tropic cyclones. Scientific Reports, 12(1), 16710.
7. Tanaka, H. K. (2023). Cosmic time calibrator for wireless sensor network. Scientific Reports, 13(1), 5951.
8. Auger, P., Ehrenfest, P., Maze, R., Daudin, J., & Fréon, R. A. (1939). Extensive cosmic-ray showers. Reviews of modern physics, 11(3-4), 288.
9. Procureur, S., Morishima, K., Kuno, M., Manabe, Y., Kitagawa, N., Nishio, A., ... & Elkarmoty, M. (2023). Precise characterization of a corridor-shaped structure in Khufu’s Pyramid by observation of cosmic-ray muons. Nature Communications, 14(1), 1144.
10. Chilingarian, A., Gharagyozyan, G., Hovsepyan, G., Ghazaryan, S., Melkumyan, L., & Vardanyan, A. (2004). Light and heavy cosmic-ray mass group energy spectra as measured by the MAKET-ANI detector. The Astrophysical Journal, 603(1), L29.
11. Abbasi, R. U., Abu-Zayyad, T., Amann, J. F., Archbold, G., Belov, K., Belz, J. W., ... & Eye, T. H. R. F. S. (2007). Search
for point-like sources of cosmic rays with energies above 1018.5 eV in the HiRes-I monocular data set. Astroparticle Physics, 27(6), 512-520.
12. Vandenbroucke, J., Bravo, S., Karn, P., Meehan, M., Plewa, M., Ruggles, T., ... & Simons, A. L. (2015). Detecting particles with cell phones: the Distributed Electronic Cosmic- ray Observatory. arXiv preprint arXiv:1510.07665.
13. Granja, C., Polansky, S., Vykydal, Z., Pospisil, S., Owens, A., Kozacek, Z., ... & Simcak, M. (2016). The SATRAM Timepix spacecraft payload in open space on board the Proba-V satellite for wide range radiation monitoring in LEO orbit. Planetary and Space Science, 125, 114-129.
14. Hovsepyan, G., & Chilingarian, A. (2023). Energy Spectra of Light Species of Primary Cosmic Rays in the Energy Range from 100 GeV to 100 PeV. Bulletin of the Russian Academy of Sciences: Physics, 87(7), 1039-1042.
15. Arteaga-Velazqueza, J.C. (2021) for the HAWC Collaboration. 37th International Cosmic Ray Conference (ICRC 2021), July 12th – 23rd, Berlin, Germany.
16. Galper, A. M., Sparvoli, R., Adriani, O., Barbarino, G., Bazilevskaya, G. A., Bellotti, R., ... & Zampa, N. (2017). The PAMELA experiment: a decade of Cosmic Ray Physics in space. In Journal of Physics: conference series (Vol. 798, No. 1, p. 012033). IOP Publishing.
17. DAMPE collaboration, An, Q., Asfandiyarov, R., Azzarello, P., Bernardini, P., Bi, X. J., ... & Zhao, X. F. (2019). Measurement of the cosmic ray proton spectrum from 40 GeV to 100 TeV with the DAMPE satellite. Science advances, 5(9), eaax3793.
18. Yoon, Y. S., Anderson, T., Barrau, A., Conklin, N. B., Coutu, S., Derome, L., ... & Wu, J. (2017). Proton and helium spectra from the CREAM-III flight. The Astrophysical Journal, 839(1), 5.
19. Adriani, O., Akaike, Y., Asano, K., Asaoka, Y., Berti, E., Bigongiari, G., ... & (CALET Collaboration). (2022). Observation of spectral structures in the flux of cosmic-ray protons from 50 GeV to 60 TeV with the calorimetric electron telescope on the international space station. Physical Review Letters, 129(10), 101102.
20. Varsi, F., Ahmad, S., Chakraborty, M., Chandra, A., Dugad, S. R., Goswami, U. D., ... & Zuberi, M. (2023). Updated results on the cosmic ray energy spectrum and composition from the GRAPES-3 experiment. SciPost Physics Proceedings, (13), 031.
21. Dorman, L. (1975) Galactic Cosmic Ray Variations. Moscow State University Press.
22. Heck, D., Knapp, J., Capdevielle, J. N., Schatz, G., & Thouw, T. (1998). CORSIKA: A Monte Carlo code to simulate extensive air showers. Report fzka, 6019(11).
23. Chilingarian, A.(1998) Program Package ANI, (User Manual)