
Journal of Sensor Networks and Data Communications(JSNDC)
ISSN: 2994-6433 | DOI: 10.33140/JSNDC
Impact Factor: 0.98

Research Article - (2025) Volume 5, Issue 1
Bayesian Identifying One or Two Close Sources by Gaussian Estimates of Planar Location under Double Emission
Received Date: Dec 10, 2024 / Accepted Date: Jan 17, 2025 / Published Date: Jan 29, 2025
Copyright: ©Ã??Ã?©2025 Oleg I. Gerasimov. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Gerasimov, O. I. (2025). Bayesian Identifying One or Two Close Sources by Gaussian Estimates of Planar Location under Double Emission. J Sen Net Data Comm, 5(1), 01-21.
Abstract
In case the separation for the parameters of interest appears below the resolution limit of the estimator, the ambiguity arises whether the two parameter estimates relate to one source emitted twice or to two close sources emitted once. The paper develops novel Bayes technique aimed to identify one/two closely spaced sources having a pair of Gaussian estimates of planar location as parameter. Prior probabilities of the one/two-sources hypotheses are available from the analysis of the physical characteristics of the emissions, assuming that they can be equally probable. The technique calculates minimal and maximal posterior probabilities of the hypotheses across all the positions at a given distance between them. When the minimal probability of one source is bigger than the maximal probability of two sources the decision is adopted in favor of one source and vice versa. Identification procedure is applied to distinguish two planar location estimates obtained for the users of basic station network by the time difference of arrival algorithm. The application gives an example of how the procedure revises the prior probabilities and can change thereby the initial preference with the distance between users.
Keywords
Separation to the Sources Location, Resolving Inequality, Probability of Resolving Inequality, Statistical Resolution Limit, Bayesian Inference, Identification Probability of One/Two-Sources
Introduction
Having two parameter estimates the problem whether one source emits twice or two sources at some separation between parameters below resolution limit emit once takes place in applications of the resolution theory. The existing approaches to identification parametrically close sources typically invoke probability of number of sources – either from subjective expert experience or Bayes inference, where such physical characteristics of a signal as spectrum, power and others are exploited. We come across the closest example of Bayes signal classification in radar, seismology and so on, when, having the probabilities of belonging of a signal to each class for each emission, it is not difficult to deduce probabilities of all possible numbers of sources for a given number of emissions using basic probability theorems [1,2]. In infrared optics, Bayesian logic is applied to obtain probability of number of neighboring screen images to overcome the smearing effect [3]. A similar problem arises in localization of blinking objects in microscopy where Bayesian framework is used to achieve probability of number of objects for the analysis below the diffraction limit [4-6]. We will refer to a solution that is able to provide the required probabilities of one and two sources as the prior solution (PS).
The resolution limit of the estimator is described by the Statistical Resolution Limit (SRL) defined as a minimal separation at which estimates are resolved correctly [7]. If the separation is less than SRL, then there will exist ambiguity about one or two sources. The concepts of SRL are primarily formulated in the detection theory and the estimation accuracy approach, [7,8-18]. Herein, we rely on the estimation accuracy utilizing the Cramer-Rao Bound (CRB) matrix-function of parameter, which under mild conditions represents a narrow lower bound on the covariance matrix of any unbiased estimator [19]. The equality to CRB is achieved in the class of efficient estimators to which we will address in the paper.
When resolving to the parameters p1 and p2 with separation â??p =SRL, â??p = |p2 - p1| , random separation between their estimates
With regard to vector case, separation should be expressed through a metric in parameter space, but SRL and PRI will clearly depend on variance of parameter component estimates and their covariance. The problem for multi-parameter estimates is considered in [16] by Korso, Boyer, Renaux and Marcos. Therein, SRL=CRB(δ), where separation δ between sets of parameters is the κ-norm distance (Minkowsky distance). Let us represent two scalar parameters p(1), p(2) in a vector form, p = é p(1) , p(2)ùr and denote estimates of vector p obtained from the decoupled emissions 1 and 2 as p1¢ , p2¢ respectively. Then, the RI is written in metric of 1-norm (at κ = 1 ) of a difference vector Dp¢ = p¢1 - p¢2 as dk =1 (Dp¢) =  Dp¢
Dp¢ = p¢(1) - p¢(1) + p¢(2) - p¢(2) £ SRL, SRL2 = (s (1) )2 + (s (2) )2 - 2cov ( p¢(1) , p¢(2) )+ (s (1) )2 + (s (2) )2 - 2cov ( p¢(1) , p¢(2) ) .
= p¢(1) - p¢(1) + p¢(2) - p¢(2) £ SRL, SRL2 = (s (1) )2 + (s (2) )2 - 2cov ( p¢(1) , p¢(2) )+ (s (1) )2 + (s (2) )2 - 2cov ( p¢(1) , p¢(2) ) .
Variance and covariance are defined via underlying CRB functions obtained from applying change of variable formula to the extended measurement model of the estimator.
This result formally extends scalar SRL on vector case, however PRI, i.e. the probability of  Dp¢1 £ SRL , could hardly be determined here in comparison with the scalar resolution criteria. Clark analyzing the resolution of estimator that produces vector decoupled Gaussian estimates offered weighted Euclidian metric of the distance between ellipsoidal confidence regions of probability 0.9 around each of the two parameters (really, Clark deals with the multiple vector parameter) [20]. The estimates are resolvable when the ellipsoids are disjoint. At the “resolution threshold” metric of the separation to the ellipsoids will be zero, and by this metric they will be tangent, but it is also not suitable to reach PRI unlike scalar case.
Dp¢1 £ SRL , could hardly be determined here in comparison with the scalar resolution criteria. Clark analyzing the resolution of estimator that produces vector decoupled Gaussian estimates offered weighted Euclidian metric of the distance between ellipsoidal confidence regions of probability 0.9 around each of the two parameters (really, Clark deals with the multiple vector parameter) [20]. The estimates are resolvable when the ellipsoids are disjoint. At the “resolution threshold” metric of the separation to the ellipsoids will be zero, and by this metric they will be tangent, but it is also not suitable to reach PRI unlike scalar case.
The paper considers the problem of identifying one/two sources by a pair of Gaussian decoupled estimates of planar location as parameter. The identifying is to perform in the domain of closely spaced sources where the covariance matrices of estimates are sufficiently approximated by a constant matrix, and thus SRL is also expected to be a constant. Discrimination positional estimates on the plane between blinking and close sources is relevant in mobile communication, molecular microscopy, astrometry and many other fields.
We construct novel Bayes technique with prior probabilities extracted from PS over two mutually exclusive events of Bayes sample space when the distance between sample estimates is either below or over SRL. The technique calculates the minimal and the maximal posterior probabilities of one and two sources across all the positions at a given distance between them. If the minimal probability of one source will be bigger than the maximal probability of two sources then we decide in favor of one source and vice versa. And thus, the probabilistic decision induced by PS can be revised with distance. To the best of our knowledge, no solution aimed to discriminate one source emitted twice and two close sources emitted once for a given pair of location estimates, which would be parameterized by the distance between hypothesized sources, has been considered previously.
When designing the event space, we need to have appropriate SRL concept for the planar decoupled estimates which would meet the following requirements: 1. SRL should be consistent with PRI when reducing to one-dimensional case and 2. the probability that the distance between estimates is smaller (bigger) than SRL, conditioned by the one/two-source hypotheses, should be computationally feasible. Clark’s idea about the ellipsoidal confidence region is transformed herein to develop new SRL concept based on circular one of the high confidence probability to this end. Accordingly, SRL is said to be equal to the sum of the radii of confidence circles around each of the two parameters each of which contains parameter estimate with high (near to unity) probability, i.e. the circles at the separation=SRL are tangent. As shown in the study, PRI for proposed SRL reaches the proximity of 1/2 as long as the planar concentration ellipsoid (CE) (the term is borrowed from [21]) of estimates difference is shrinking along the minor axis and by that degenerating towards a scalar case. The computation of the probability required is feasible for a given difference between the parameters and the covariance matrices of each estimate. If the circles around location sample estimates intersect the distance between them occurs below SRL, otherwise, when they are disjoint – over SRL in Bayes event space.
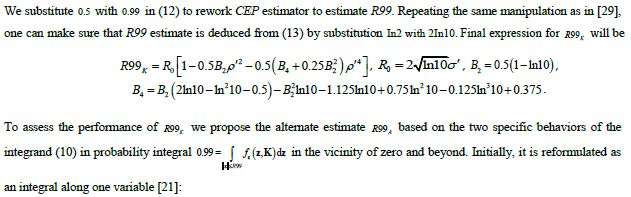
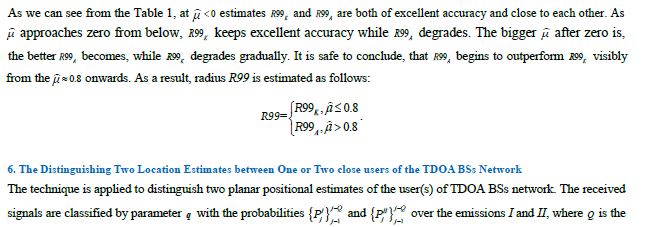
The technique’s work is illustrated in the example of distinguishing two positional estimates between one and two close each other users of the time difference of arrival (TDOA) basic stations (BS)s network. The signals there are classified to derive the initial probabilities of one and two users. The solution must answer the following question: does one user emit twice or do two users at some distance between them emit once. The technique implementation is based on the radius of the high confidence circle obtained in the paper for the confidence probability 0.99. This radius will subsequently be denoted as R99.
The rest of the paper is organized as follows. The problem is described in Section 2. New concept of SRL is founded in Section 3. Section 4 contains the design of Bayesian identification technique. The algorithm for estimation of R99 is presented in Section 5. Proposed technique as applied in TDOA BSs network is quantitatively studied in Section 6. Section 7 briefly draws the summary of the paper.
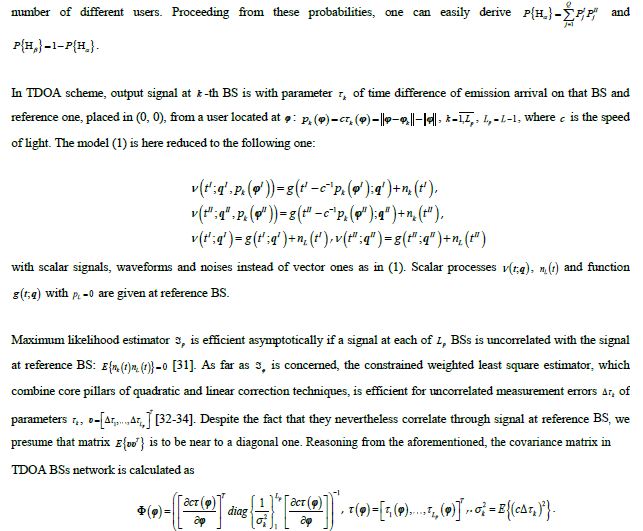
Statement of the Problem
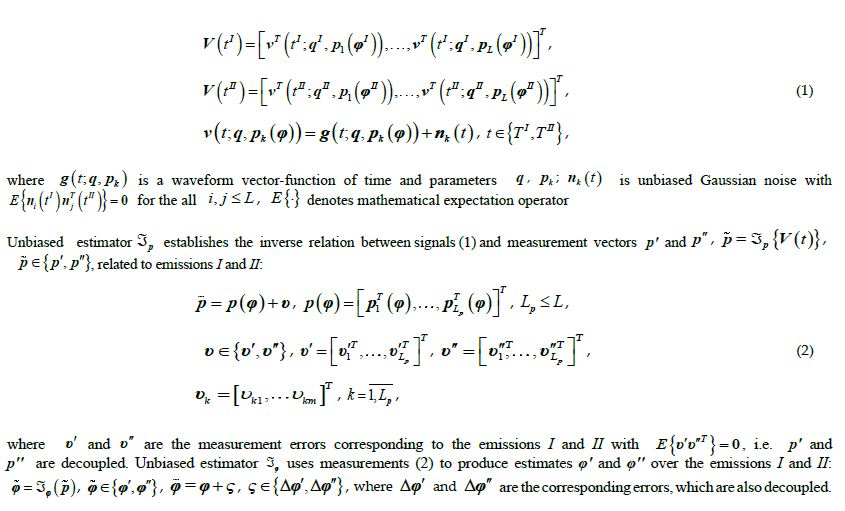
During two consecutive time intervals T 1 and T II : T I T II = Æ, t I ÎT I , t II ÎT II , L signals from emission I and L signals from emission II are received. The k - th signal depends upon vector parameter q , q Î{qI ,qII }, gathering physical characteristics of the emissions, and m - dimensional measurement parameter pk (φ) which is a known smooth function of a two-dimensional unknown vector of the source location, φ Î{φI , φII }:
The Concept of SRL Based on High Confidence Circle



Bayesian Identification Technique
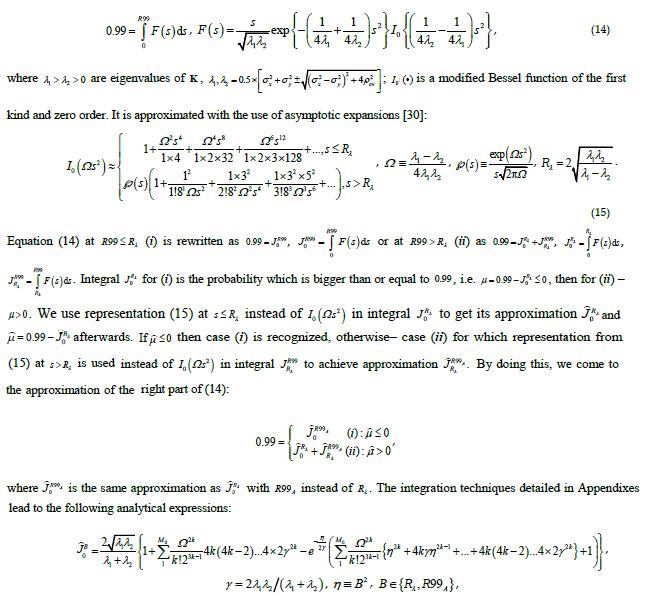
Estimation of R99
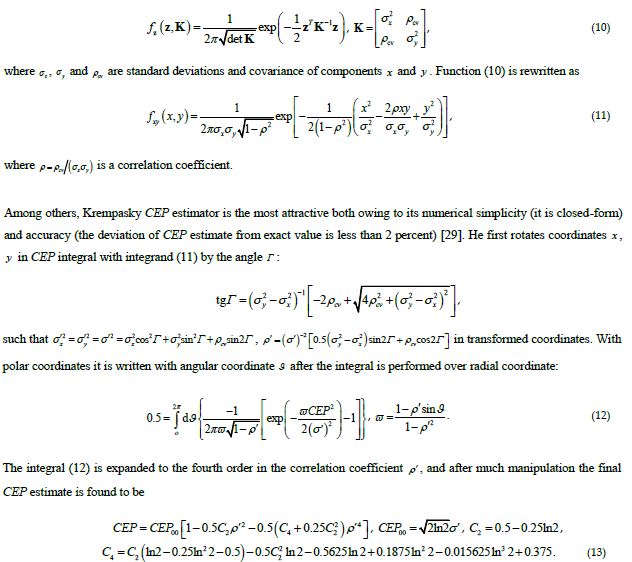
The topic of a confidence circle has been addressed in a number of publications regarding circular error probability (CEP) integral, occurring in navigation and surveillance systems [25-29]. CEP is the radius of a confidence circle which contains a random variable with probability 0.5.
The probability density for zero mean bivariate Gaussian variable z = [x y]T with covariance matrix K is defined as
|
|
R ò0 F (s)ds, R Î{R99K , R99A} Krempasky Alternate |
æ R99K -1ö´100 è A ø |
|
|
-0.0098 |
0.9900 |
0.9900 |
0.00 |
|
-0.0097 |
0.9899 |
0.9899 |
0.00 |
|
-0.0064 |
0.9899 |
0.9897 |
0.12 |
|
-0.0032 |
0.9899 |
0.9880 |
1.90 |
|
0.0014 |
0.9900 |
0.9921 |
-2.50 |
|
0.0086 |
0.9898 |
0,9874 |
2.70 |
|
0.1083 |
0.9900 |
0.9875 |
2.70 |
|
0.1446 |
0.9899 |
0.9880 |
2.40 |
|
0.1985 |
0.9902 |
0.9887 |
1.90 |
|
0.2502 |
0.9903 |
0.9893 |
1.30 |
|
0.3045 |
0.9906 |
0.9899 |
0.85 |
|
0.4009 |
0.9911 |
0.9909 |
0.19 |
|
0.4346 |
0.9912 |
0.9912 |
0.00 |
|
0.5112 |
0.9916 |
0.9916 |
0.00 |
|
0.5429 |
0.9916 |
0.9916 |
0.00 |
|
0.5862 |
0.9917 |
0.9915 |
0.22 |
|
0.6115 |
0.9917 |
0.9915 |
0.33 |
|
0.6465 |
0.9919 |
0.9914 |
0.60 |
|
0.7025 |
0.9921 |
0.9914 |
1.00 |
|
0.7949 |
0.9925 |
0.9911 |
1.80 |
|
0.8512 |
0.9926 |
0.9909 |
2.70 |
|
0.8840 |
0.9926 |
0.9905 |
3.10 |
|
0.9208 |
0.9927 |
0.9905 |
3.50 |
|
0.9794 |
0.9932 |
0.9900 |
4.40 |
|
0.9867 |
0.9958 |
0.9900 |
5.40 |
|
0.9883 |
0.9967 |
0.9900 |
6.50 |
Table 1: Simulation Results on Performance of R99K versus R99A.
Characterization of the CUD
|
Subdomain |
Distance r |
|
|
|
|
r £ SRL |
14.5133m 29.0266m |
14.5133m 14.5132m |
29.0266m 29.0265m |
0.0253m 0.0507m |
|
r > SRL
↓ |
33m 38m |
14.5132m 14.5132m |
29.0265m 29.0265 |
0.0576m 0.0664m |
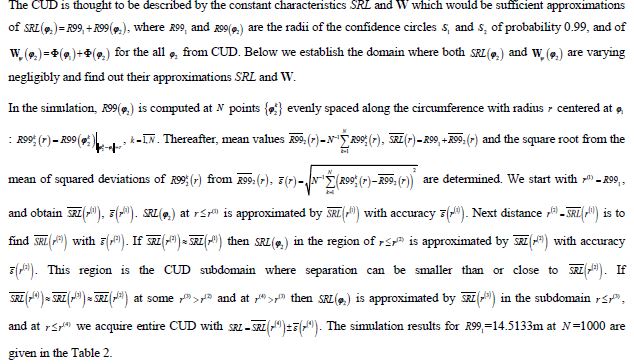
Table 2: CUD Characterization on SRL.
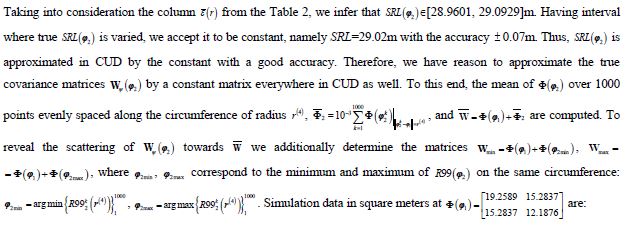
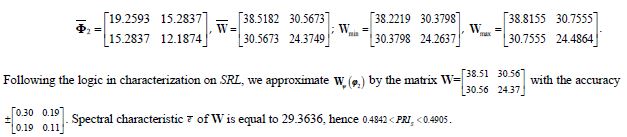
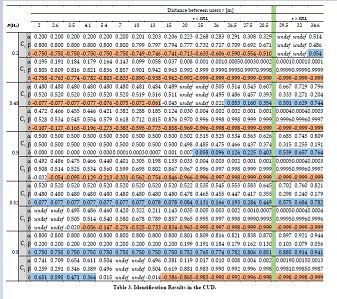
Identifying in the CUD
Discussion and Conclusion
The behavior of IPs as function of separation r depends on the prior probability as parameter and cardinally on what event from Bayes event space happens.
When the prior probability of two-user hypothesis is large enough then at C = C1 identification procedure only recalculates the initial probability in the direction of decrease up to a distance around SRL leaving PS-decision unchanged, PS- decision is changed by procedure in favor of one user with some distance over SRL; identification does not work between that distances. At C = C2 PS-decision remains unchanged everywhere in CUD with recalculation of initial probability in the direction of increase. If, on the other hand, prior probability of one-user hypothesis is large enough then at C = C1 PS- decision is unchanged in the CUD with a growth of initial probability. At C = C2 PS-decision is unchanged with a descent of initial probability up to some distance below SRL, but with some greater distance also below SRL PS-decision is changed in favor of two users in the rest of the CUD; between that distances identification does not work.
If the two-user hypothesis is slightly more probable than the one-user one then at C = C1 PS-decision is unchanged with a descent of initial probability up to some distance below SRL, but with some greater distance also below SRL and further PS-decision is changed in favor of one user; between that distances we may not select a hypothesis. At C = C2 PS-decision is unchanged in the CUD with a growth of initial probability. If the one-user hypothesis is slightly more probable than the two-user one then at C = C1 PS-decision is unchanged in the CUD with a growth of initial probability. At C = C2 initial probability decreases remaining PS-decision to be unchanged only at negligibly small distances, but starting from some short distance it is changed in favor of two users; we may not select a hypothesis between that distances.
For equally probable hypotheses initial probabilities both are equal to 0.5. The probability of one user at C = C1 increases with distance while of two users – decreases. Beginning from big enough distance below SRL PS-decision (which is no preference herein) is changed in favor of one user; at smaller distances preference is impossible. The probability of two users at C = C2 increases with distance while of one user – decreases. Beginning from small enough distance PS-decision is changed in favor of two users; before that distance preference is impossible.
Concluding Remarks
The novel Bayesian technique aimed to identify one or two closely spaced sources under double emission through the use of location estimates with the approximately equal covariance matrices, which is parameterized by the sources separation, is designed. Prior probabilities of the one/two-sources hypotheses are determined via physical characteristics of the emissions and extracted from the prior solution (abbreviated as PS in the paper), assuming that they can be equally probable.
Function of the technique below and over the resolution limit of the estimator is provided by the new resolution criterion emphasizing the probability of the resolving of the planar parameter decoupled estimates (abbreviated as PRI in the paper). The resolution limit in this criterion is so called Statistical Resolution Limit (abbreviated as SRL in the paper), which is consistent in PRI with conventional scalar resolution criteria. It is equal to the sum of the radii of the confidence circles around each parameter in charge of probability 0.99.
Bayes event space consists of two mutually exclusive events: when confidence circles around sample estimates intersect or do not intersect, accordingly when the distance between them is below or over SRL. The extreme probabilities of the events conditioned by one/two-sources hypotheses depend on the distance between locations of hypothesized sources which may be taken both below and over SRL.
Identification procedure is studied as applied for the distinguishing positional estimates between one and two close users of time difference of arrival basic stations network. The results of the simulation illustrate the mechanism of how it revises PS-decision with distance between users subject to Byes event.In the future we plan to extend proposed technique on a more general problem of identifying the number of sources, each of which can emit one or several times by a given set of location estimates
References
1. Xiao, Z., & Yan, Z. (2020, June). Radar emitter identification based on naive Bayesian algorithm. In 2020 IEEE 5th Information Technology and Mechatronics Engineering Conference (ITOEC) (pp. 1242-1244). IEEE.
2. Tempola, F., Muhammad, M., & Khairan, A. (2018, September). Naive bayes classifier for prediction of volcanic status in indonesia. In
2018 5th International conference on information technology, computer, and electrical engineering (ICITACEE) (pp. 365-369). IEEE.
3. Bretthorst, G. L., & Smith, C. R. (1989, June). Bayesian analysis of signals from closely-spaced objects. In Infrared Systems and Components III (Vol. 1050, pp. 93-104). SPIE.
4. Schodt, D. J., & Lidke, K. A. (2021). Spatiotemporal clustering of repeated super-resolution localizations via linear assignment problem. Frontiers in Bioinformatics, 1, 724325.
5. Fazel, M., Wester, M. J., Schodt, D. J., Cruz, S. R., Strauss, S., Schueder, F., ... & Lidke, K. A. (2022). High-precision estimation of emitter positions using Bayesian grouping of localizations. Nature Communications, 13(1), 7152.
6. Fazel, M., & Wester, M. J. (2022). Analysis of super-resolution single molecule localization microscopy data: A tutorial. AIP advances, 12(1).
7. Smith, S. T. (2005). Statistical resolution limits and the complexified crame/spl acute/r-rao bound. IEEE Transactions on Signal Processing, 53(5), 1597-1609.
8. Abramovich, Y. I., Johnson, B. A., & Spencer, N. K. (2009, August). Statistical nonidentifiability of close emitters: Maximum-likelihood estimation breakdown. In 2009 17th European Signal Processing Conference (pp. 1968-1972). IEEE.
9. Amar, A., & Weiss, A. J. (2008). Fundamental resolution limits of closely spaced random signals. IET Radar, Sonar & Navigation, 2(3), 170-179.
10. Abramovich, Y. I., & Johnson, B. A. (2010). Detection–Estimation of Very Close Emitters: Performance Breakdown, Ambiguity, and General Statistical Analysis of Maximum-Likelihood Estimation. IEEE Transactions on Signal Processing, 58(7), 3647-3660.
11. Sun, M., Jiang, D., Song, H., & Liu, Y. (2017). Statistical resolution limit analysis of two closely spaced signal sources using Rao test. IEEE Access, 5, 22013-22022.
12. Zhang, Y., Zhu, W., Tang, B., Tang, J., Zheng, G., & Bhattacharjya, A. (2018). Angular statistical resolution limit of two closely-spaced point targets: a GLRT-based study. IEEE Access, 6, 75924-75936.
13. Liu, P., & Zhang, H. (2021). A mathematical theory of computational resolution limit in multi-dimensional spaces. Inverse Problems, 37(10), 104001.
14. Lee, H. B. (1992). The Cramér-Rao bound on frequency estimates of signals closely spaced in frequency. IEEE Transactions on Signal Processing, 40(6), 1507-1517.
15. Delmas, J. P., & Abeida, H. (2006, May). Statistical resolution limits of DOA for discrete sources. In 2006 IEEE International Conference on Acoustics Speech and Signal Processing Proceedings (Vol. 4, pp. IV-IV). IEEE.
16. El Korso, M. N., Boyer, R., Renaux, A., & Marcos, S. (2010, March). Statistical resolution limit for multiple parameters of interest and for multiple signals. In 2010 IEEE International Conference on Acoustics, Speech and Signal Processing (pp. 3602-3605). IEEE.
17. Wang, Y., Wu, Y., & Shen, Y. (2019). On the resolution limits for MIMO localization. IEEE Communications Letters, 23(3), 462-465.
18. Zhang, H., Xu, D., & Wang, N. (2023). Explicit Joint Resolution Limit for Range and Direction-of-Arrival Estimation in MIMO Radar. IEEE Transactions on Aerospace and Electronic Systems, 59(5), 5422-5432.
19. Cramér, H. (1999). Mathematical methods of statistics (Vol. 26). Princeton university press.
20. Clark, M. P. (1995). On the resolvability of normally distributed vector parameter estimates. IEEE Transactions on Signal Processing, 43(12), 2975-2981.
21. Torrieri, D. J. (1984). Statistical theory of passive location systems. IEEE transactions on Aerospace and Electronic Systems, (2), 183- 198.
22. Delmas, J. P. (2002). Asymptotic performance of second-order algorithms. IEEE Transactions on Signal Processing, 50(1), 49-57.
23. Dwight, H. B. (1947). Tables of integrals and other mathematical data. New York: The MacMillan Company.
24. Duchesne, P., & De Micheaux, P. L. (2010). Computing the distribution of quadratic forms: Further comparisons between the Liu– Tang–Zhang approximation and exact methods. Computational Statistics & Data Analysis, 54(4), 858-862.
25. Gillis, J. T. (1991). Computation of the circular error probability integral. IEEE Transactions on Aerospace and Electronic Systems, 27(6), 906-910.
26. Pyati, V. P. (1993). Computation of the circular error probability (CEP) integral. IEEE Transactions on Aerospace and Electronic Systems, 29(3), 1023-1024.
27. Shnidman, D. A. (1995). Efficient computation of the circular error probability (CEP) integral. IEEE Transactions on Automatic Control, 40(8), 1472-1474.
28. Ignagni, M. (2010). Determination of circular and spherical position-error bounds in system performance analysis. Journal of Guidance, Control, and Dynamics, 33(4), 1301-1305.
29. Krempasky, J. J. (2003). CEP equation exact to the fourth order. Navigation, 50(3), 143-149.
30. Abramowitz, M., & Stegun, I. A. (Eds.). (1968). Handbook of mathematical functions with formulas, graphs, and mathematical tables (Vol. 55). US Government printing office.
31. Huang, Y., Benesty, J., & Chen, J. (2006). Time delay estimation and acoustic source localization. Acoustic MIMO signal processing, 215-259.
32. Cheung, K. W., So, H. C., Ma, W. K., & Chan, Y. T. (2006). A constrained least squares approach to mobile positioning: algorithms and optimality. EURASIP Journal on Advances in Signal Processing, 2006, 1-23.
33. Chan, Y. T., & Ho, K. C. (1994). A simple and efficient estimator for hyperbolic location. IEEE transactions on signal processing, 42(8), 1905-1915.
34. Huang, Y., Benesty, J., Elko, G. W., & Mersereati, R. M. (2001). Real-time passive source localization: A practical linear-correction least-squares approach. IEEE transactions on Speech and Audio Processing, 9(8), 943-956.
35. Liu, H., Tang, Y., & Zhang, H. H. (2009). A new chi-square approximation to the distribution of non-negative definite quadratic forms in non-central normal variables. Computational Statistics & Data Analysis, 53(4), 853-856.