
Advances in Theoretical & Computational Physics(ATCP)
ISSN: 2639-0108 | DOI: 10.33140/ATCP
Impact Factor: 2.6

Research Article - (2025) Volume 8, Issue 4
Analytical Solutions for The Many-Body Problem
Received Date: Sep 10, 2025 / Accepted Date: Nov 21, 2025 / Published Date: Nov 28, 2025
Copyright: ©2025 Liu Jinyong. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Jinyong, L. (2025). Analytical Solutions for The Many-Body Problem. Adv Theo Comp Phy, 8(4), 01-12.
Abstract
This work is a theoretical breakthrough in the study of the many-body problem. Breaking the long-standing myth that the many- body problem cannot be solved analytically, the analytic solutions of the orbit equation, periodic formula, and the motion equation of the many-body problem are obtained skillfully herein. Furthermore, this study offers a rigorous mathematical proof of the coplanarity and common direction of celestial bodies within such systems. The conclusions are mathematically accurate and complete, potentially marking a culmination of over 300 years of inquiry since Newton first posed the problem. From a physics perspective, this study provides a theoretical basis for the stable operation of celestial systems that is fully aligned with astronomical observation across large and small galactic structures. Notably, the discovery that the orbital period of celestial bodies is related to their own mass is of great significance for studying the formation and evolution of galaxies and planetary systems.
Keywords
Grouping Mechanics, Equivalent Gravity, Many-Body Problem, Orbital Equation, Co-Planarity, Co-Directionality
Introduction
The many-body problem, also known as the N-body problem, is one of the fundamental theoretical issues in celestial mechanics. Its origin can be traced back to Newton's publication of "Philosophiæ Naturalis Principia Mathematica" in 1687. Over the following two hundred years, almost every renowned mathematician of the 18th and 19th centuries devoted themselves to studying this problem, yet no analytical solution was ever found.
Poincaré was one of the representative mathematicians who delved deeply into the multi-body problem. In 1890, he published a 270- page paper proving that the precise trajectories of celestial bodies could not be described by a closed analytical expression, and thus asserted that there was no general analytical solution to the multi-body problem. This conclusion changed the paradigm of the multi-body problem: the academic community gradually abandoned the pursuit of a global analytical solution and instead developed alternative research paths such as perturbation theory and central configuration theory. Although these methods, supported by modern mathematical tools and computational techniques such as functional analysis and numerical simulation, can provide local, approximate, or restricted solutions under specific conditions, they are applicable only to special systems with strict constraints. Since natural laws cannot be artificially imposed, any approximate or restrictive model cannot fully and accurately depict the dynamic behavior of real multi-body systems.
Although the traditional approach to solving the many-body problem has largely fallen silent, it remains an important goal in scientific exploration. In the course of studying the general frame of reference [1], the author of this work discovered a mechanical property of particle groups [2] (i.e., many-body systems): when the n particles in the system are arbitrarily divided into k subgroups (k < n), each subgroup exhibits mechanical equivalence to a single particle under mutual interaction. This property offers new possibilities for solving the many-body problem. In particular, when the entire system is divided into two particle groups, the original many-body problem can be transformed into an equivalent two-body problem. Given that the two-body problem was successfully solved by Johann Bernoulli in 1710, if a reasonable equivalent model can be established on this basis, an analytical breakthrough in the many-body problem is expected. Further research indicates that the classical Newtonian law of universal gravitation, in essence, strictly applicable only to the two-body case and has limitations in many-body systems [3]. Therefore, this study proposes the concept of "equivalent gravity" [4] to describe the macroscopic gravitational interaction between two particle groups. Based on this framework, the author attempts to construct an analytical solution for the many-body problem by reproducing and extending the solution process of the two-body problem.
Since a rigorously proven version has not yet been found as a basis, this study re-derives the formulas of the two-body problem to provide theoretical support for the subsequent analytical research on the many-body problem.
Celestial Orbital Equations and Periods
In the general framework of reference theory, it has been proven that the center-of-mass coordinate system of a many-body system is an inertial frame [5], indicating that inertial frames do indeed exist within many-body systems. To facilitate readers' understanding and acceptance, the following discussion is carried out in an inertial frame (not necessarily the center-of-mass coordinate system).
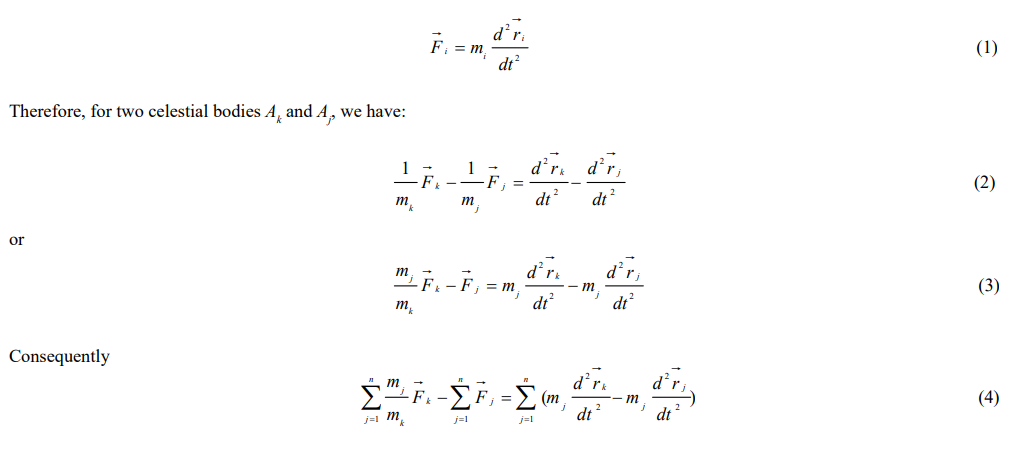
In a celestial system consisting of n celestial bodies, the i-th celestial body is denoted as Ai. Suppose the mass of Ai is mi and its position vector in the inertial frame S is r i . The resultant force acting on celestial body Ai due to the remaining (n - 1)celestial bodies is F i , of which i = 1, 2, 3,=, n . According to Newton's second law, we have:
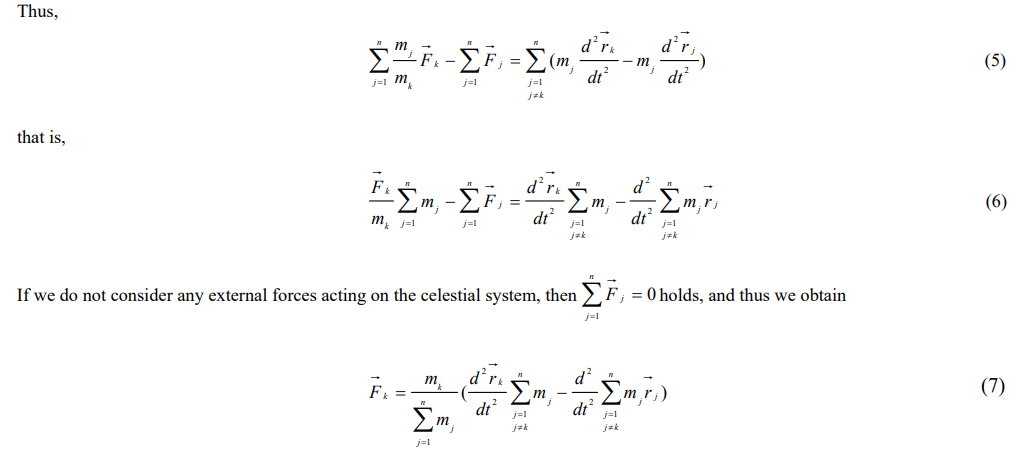
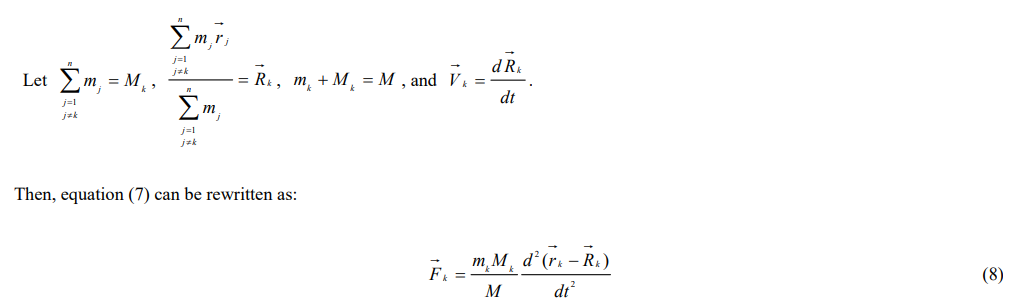
In this manner, the entire celestial system is conceptually partitioned into two groups: the first group is composed of a single celestial body Ak, while the second group consists of all celestial bodies other than Ak. Here, Mk represents the total mass of the celestial bodies in the second group, and ![]() is the position vector of its center of mass. When we focus solely on the gravitational interactions within the celestial system,
is the position vector of its center of mass. When we focus solely on the gravitational interactions within the celestial system, ![]() represents the sum of the gravitational forces exerted by each body in the second group on. Equation (8) reveals that the gravitational influence of the celestial bodies in the second group on Ak is equivalent to the gravitational effect of a single celestial body, with the total mass of the second group concentrated at its center of mass, acting on Ak. As a result, a gravitational problem with intricate relationships is simplified to one involving just two individual celestial bodies.
represents the sum of the gravitational forces exerted by each body in the second group on. Equation (8) reveals that the gravitational influence of the celestial bodies in the second group on Ak is equivalent to the gravitational effect of a single celestial body, with the total mass of the second group concentrated at its center of mass, acting on Ak. As a result, a gravitational problem with intricate relationships is simplified to one involving just two individual celestial bodies.
The gravitational relationship between these two single celestial bodies (the equivalent celestial bodies of the groups) must be well- defined and must satisfy the law of universal gravitation. We refer to the gravitational force between the two equivalent celestial bodies as the equivalent gravity. Hence
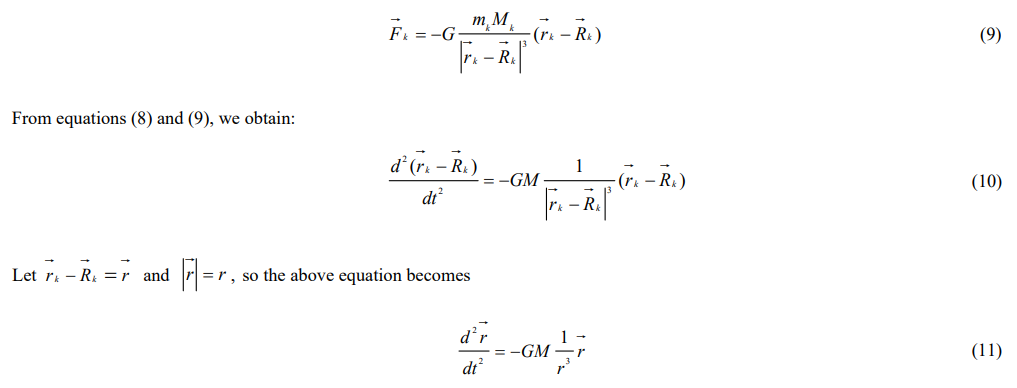
After grouping, the many-body problem is transformed into a two-body problem: one of the objects is a single object mk, which is denoted by Ak; the other is the equivalent object of group {m i €{1, 2, L , n}, i ¹ k} , which is denoted by Bk. Since the two-body problem can be analytically solved, the operation law of the k-th celestial body Ak can be solved.
Let us find the analytical solution for Ak
In the plane of motion of Ak around Bk (Ak has planar motion in the centroid field), a polar coordinate system is established with Bk as the pole (Figure 1).
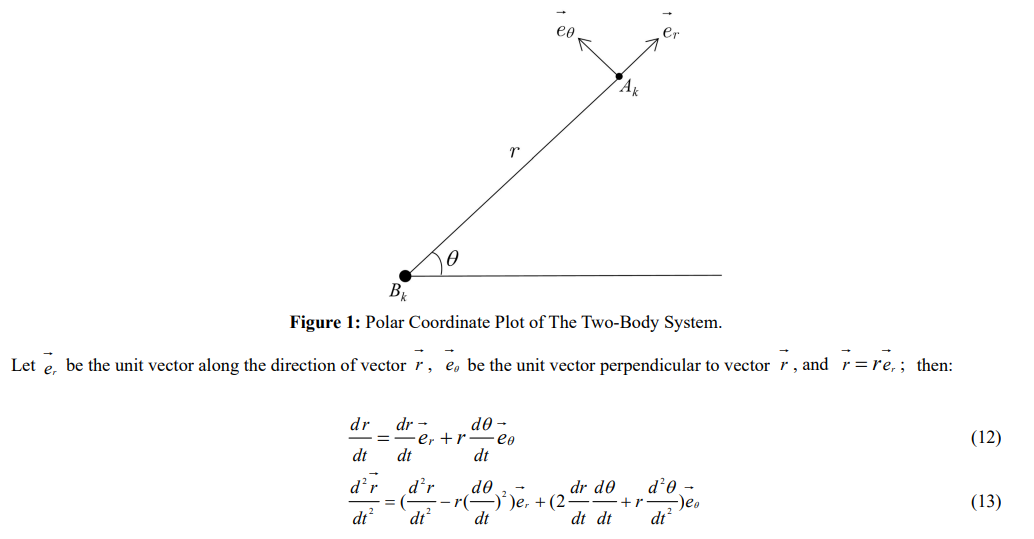
This equation is Kepler's second law.
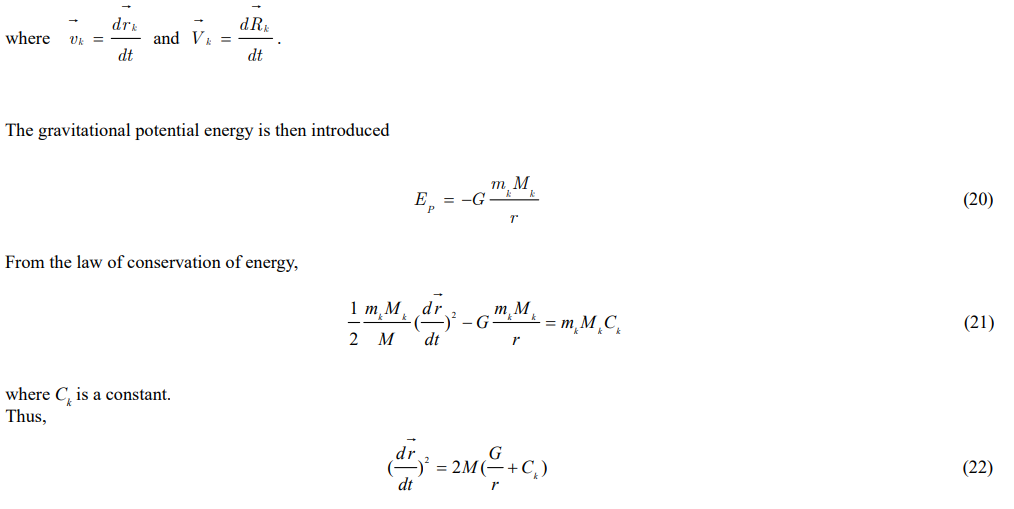
By grouping the mechanical kinetic energy [6], we obtain:

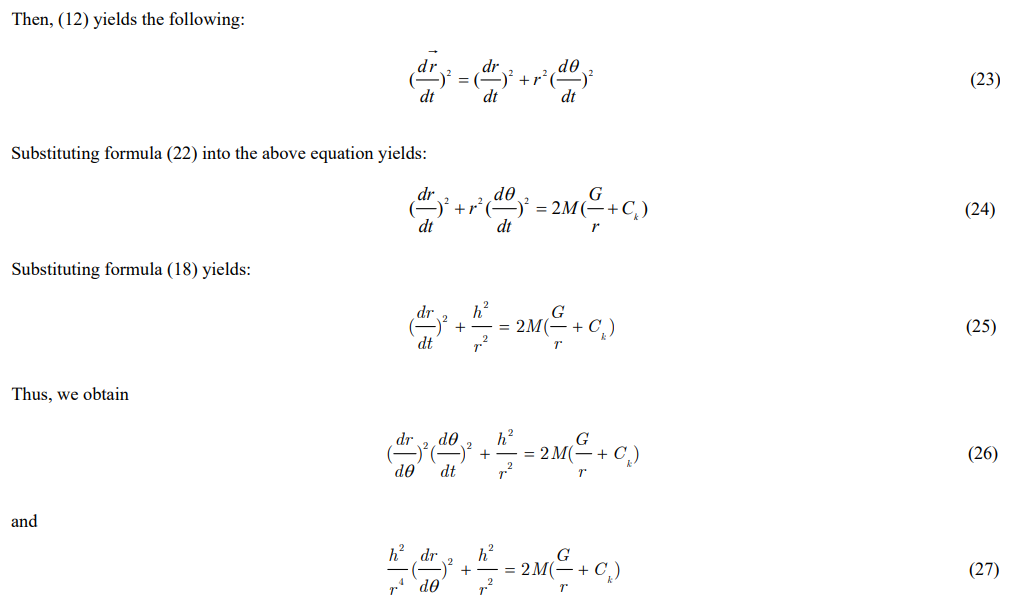

This is Kepler's third law.
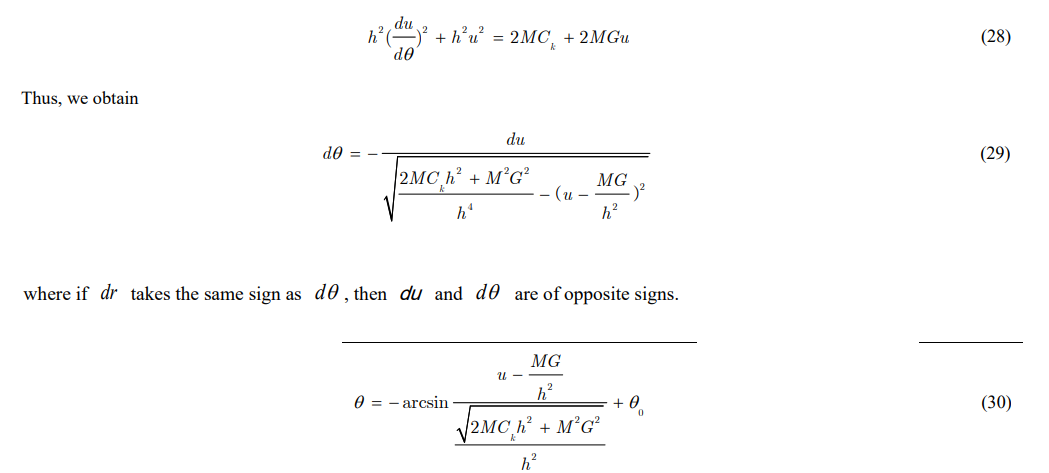
Thus, we have derived the orbit and period of celestial body Ak in a celestial body system composed of n bodies and proven Doppler's second and third laws.
Equations of Motion of Celestial Bodies
Equation (25) yields:
Substituting orbital equation (32) into (39) yields:
Equations (39) and (40) provide the equation of motion of celestial body Ak.
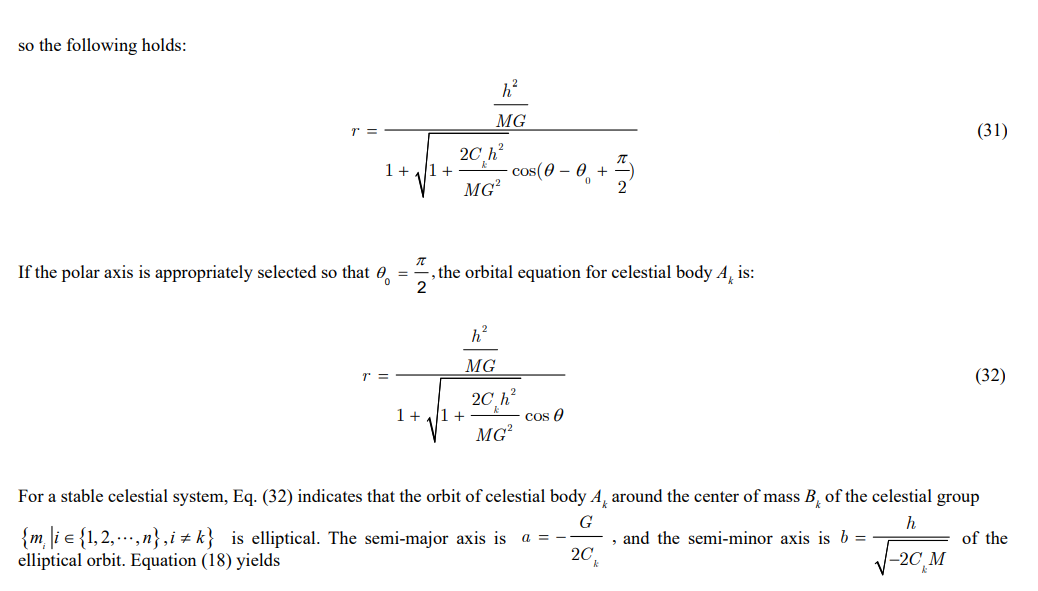
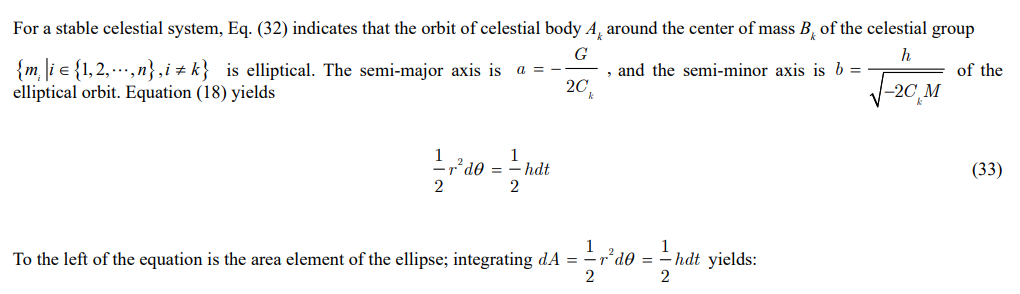
Celestial Body Equation in Barycentric Systems
We have proven that the orbits of the equivalent celestial bodies represented by a celestial body and a group of celestial bodies are in the same plane (Figure 2).
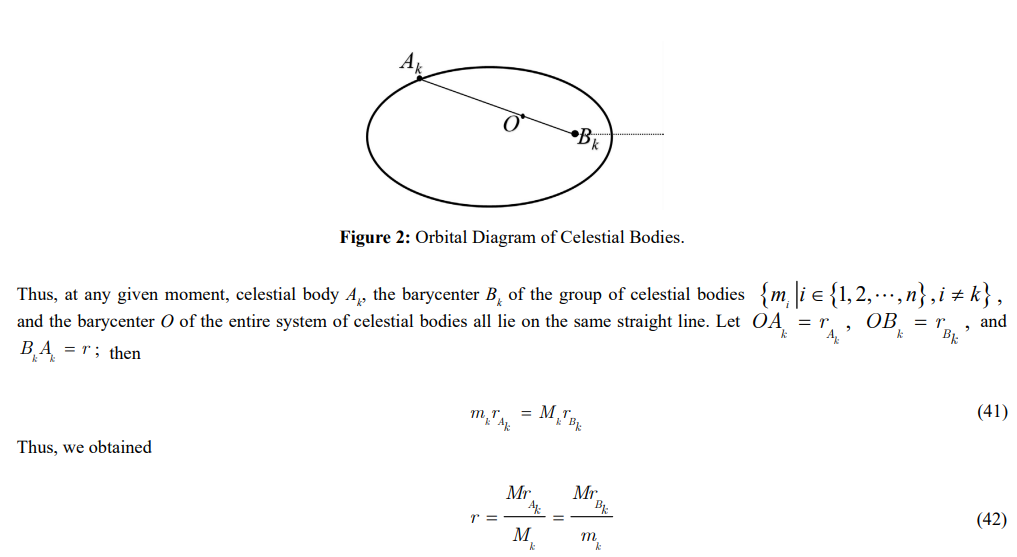
The polar coordinate system was established with O as the pole (Figure 3), and the polar axis and pole are in the same direction at point Bk. Then, the polar angle of rAk is q , and the polar angle of rBk is (q +p ), which is obtained by equation (32).
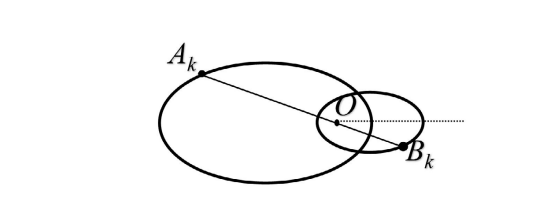
Figure 3: Orbital Diagram of The Celestial Body Around the Barycentre
Equation (45) indicates that the k th celestial body orbits around the center of mass of the system in an ellipse. When k takes all values in n, we obtain that all celestial bodies of the system move in elliptical orbits around the center of mass of the celestial system.
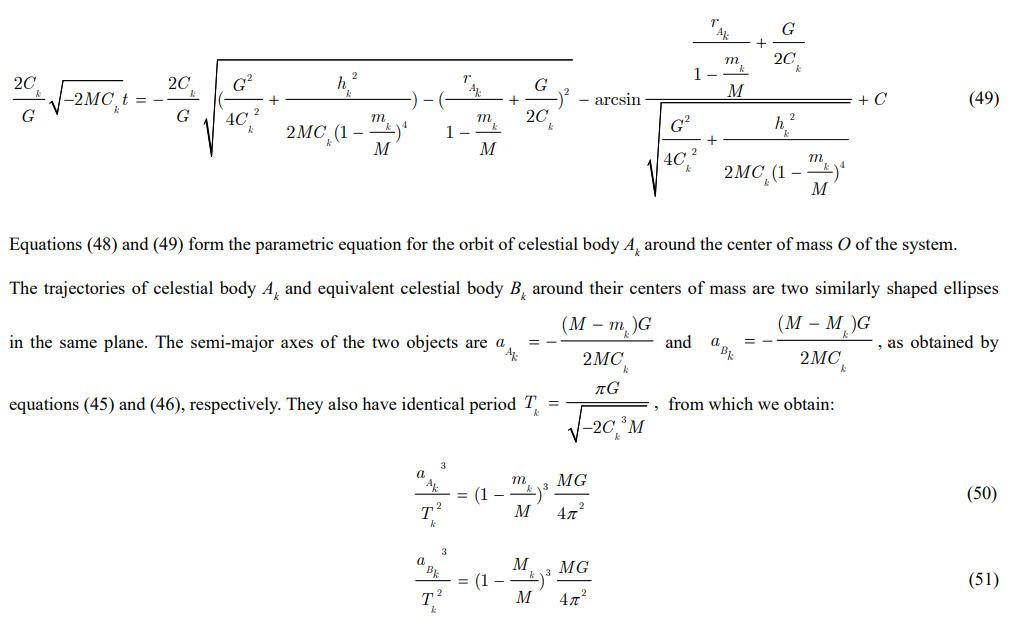
Equations (50) and (51) show that the ratio of the cube of the semi-major axis of the elliptical orbit to the square of the revolution period is not constant when the celestial body moves around the center of mass of the system, and Kepler's third law is not accurate for this orbit. Meanwhile, we obtain that if two celestial bodies share the same orbit around the center of mass of the system, then the less massive celestial body has a smaller orbital period, and they eventually merge to a single planet or one becomes a satellite of the other. Thus, there are no multiple planets in the orbit of the same planet.
Orbital Co-Planarity and Co-Directionality
Celestial bodies have elliptical orbits and other properties such as co-planarity and co-directionality. We provide the theoretical proof of these characteristics below.
First, let us prove the co-planarity of the orbits of celestial bodies in a three-body system. There are three celestial bodies A, B , and C (Figure 4), O is their center of mass, and the elliptical orbit of celestial body A is on plane π, so the center of mass O, which is the focal point of the elliptical orbit, must also be on plane π.
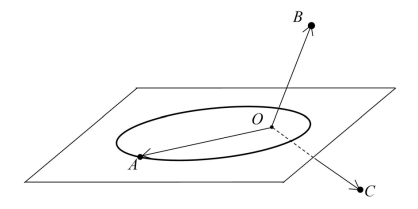
Figure 4: Diagram of Celestial Motion Co-Planarity
Assuming that the three celestial bodies do not have coplanar orbits, then the orbits of celestial bodies B and C must intersect with plane π. Thus, when celestial bodies B and C are orbiting along their respective paths, they must periodically pass through plane π, and celestial bodies B and C must also simultaneously pass through plane π (when one of celestial bodies B or C passes through plane π while the other does not, then the center of gravity O of the three celestial bodies does not lie on plane π ). Celestial bodies B and C repeatedly simultaneously pass through and plane π and simultaneously leave it, i.e., celestial bodies B and C have equal cycles. Similarly, celestial bodies A and B have equal cycles, so celestial bodies A, B , and C have equal cycles, which is obviously a wrong conclusion. This is a proof by contradiction that the orbits of the three celestial bodies are coplanar.
For an N-body system ( N ≥ 3), divide N celestial bodies into three groups: select any single celestial body as the first group, and select another single celestial body as the second group; then, the remaining celestial bodies form the third group. Thus, the many-body problem becomes a three-body problem, and the orbits of the single celestial bodies and the equivalent bodies represented by the other group are coplanar. The first group is coplanar with the second group of two single celestial bodies, i.e., the orbits of any two celestial bodies are coplanar, so the orbits of all objects in the celestial system are coplanar.
Next, let us prove the co-directionality of the motion of celestial bodies around the centroid of the celestial system.

This relationship shows that the motion of the celestial body around the center of mass is co-directional for three celestial bodies (Fig. 6). Equations (52) and (54) present the mathematical rationale for the coplanarity of the three-body motion. Equation (52) implies that the three celestial bodies, together with their center of mass, define a plane σ. Equation (54), in turn, demonstrates that the three velocity vectors lie within the same plane. Given that the starting points of the three velocity vectors are situated on plane σ , their endpoints must also lie on plane σ. This effectively proves the coplanarity of the motion of the three celestial bodies.
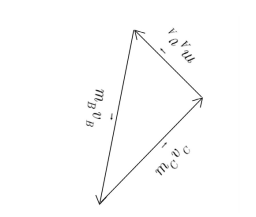
Figure 6: Graph Showing Vectors with Co-Directionality
For an N-body system (N ≥ 3 ), if N objects are divided into three groups (any single object as the first group, another single object as the second group, and the remaining objects as the third group), then all objects in the system move around the center of mass in the same direction of motion of any two single objects (and equivalent objects represented by the other group) around the center of mass.
Summary
Using the formulations developed within this new theoretical framework, we have analytically solved the orbital equation, period formula, and equations of motion for the many-body problem.
These results are mathematically rigorous and elegant, potentially marking the culmination of over three centuries of inquiry into the many-body problem since its initial formulation by Newton.
From a physical perspective, our findings indicate that celestial systems exhibit stable dynamics: all constituent bodies orbit the system’s center of mass along elliptical paths in a periodic manner. This behavior aligns precisely with astronomical observations of both large- scale galaxies and smaller planetary systems. The deterministic nature of orbital paths, the precision of orbital periods (which are measurable to the second), and the observed co-planarity and co-directionality of celestial motion cannot be adequately described by chaos theory.
We demonstrate that the orbital period of a celestial body around the system’s center of mass depends on the body’s own mass. Consequently, objects of differing masses occupying the same orbital path will exhibit different orbital periods—an insight with significant implications for understanding planetary and galactic formation.
Additionally, we provide a mathematical proof of the co-planarity and co-directionality of celestial motion within many-body systems.
The concept of equivalent gravity is introduced based on solid theoretical grounds; however, its adoption may necessitate revisions to gravitational theory in many-body contexts. Further theoretical exploration and experimental validation are required. Due to resource constraints, the author is currently unable to conduct such experiments.
For celestial bodies moving along elliptical orbits within a system, substituting observational data into our derived orbital equations allows for precise parameter calibration, enabling accurate alignment between theoretical predictions and actual observations. Our analysis does not yield non-standard orbital configurations. Should anomalous orbits (e.g., figure-eight trajectories) be observed astronomically, this would suggest potential flaws or omissions in the current theoretical model.
Finally, this study does not consider other celestial body forces such as electromagnetic interactions. While such forces could lead to phenomena that are inconsistent with our theoretical framework, they fall outside the scope of this work, and the author assumes no responsibility for discrepancies arising from their influence.
Data Availability Statement
Data sharing is not applicable to this article as no new data were created or analyzed in this study.
References
- Liu, J. Y. (2025). Rebellious science: Physics correction and innovation (p. 36). Overseas Chinese Press Inc.
- Liu, J. Y. (2025). Rebellious science: Physics correction and innovation (pp. 40–43). Overseas Chinese Press Inc.
- Liu, J. Y. (2025). Rebellious science: Physics correction and innovation (pp. 52–54). Overseas Chinese Press Inc.
- Liu, J. Y. (2025). Rebellious science: Physics correction and innovation (p. 51). Overseas Chinese Press Inc.
- Liu, J. Y. (2025). Rebellious science: Physics correction and innovation (pp. 47–48). Overseas Chinese Press Inc.
- Liu, J. Y. (2025). Rebellious science: Physics correction and innovation (p. 41). Overseas Chinese Press Inc.