


Review Article - (2025) Volume 3, Issue 1
Monitoring the Position of Solar Panels Using IIS Algorithms
Received Date: Dec 04, 2024 / Accepted Date: Dec 30, 2024 / Published Date: Jan 06, 2025
Copyright: ©Â©2025 Andriy Semeniuk. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Citation: Semeniuk, A. (2025). Monitoring the Position of Solar Panels Using IIS Algorithms. Eng OA, 3(1), 01-05.
Abstract
The article deals with a metaheuristic system for controlling the position of a solar panel. This method can be used to create self- learning intelligent control systems for solar power plants (SPP).
Keywords
Metaheuristic System, Solar Power Plant, Self-Learning, Position Control
Introduction
The efficient operation of solar power generation systems using solar panels (SP) is impossible without position controllers on the Sun. Thanks to them, SPs are positioned in a state of maximum energy generation. For this, the sun's rays must fall perpendicularly on the SP. These controllers monitor the position of the Sun in its orbit during the day, and based on this data, send control signals to the solar panel rotation mechanisms [1]. The basis of the construction of an intelligent solar panel position management system (ISPPMS) is a combination of passive and active methods of controlling the direction of the sun. With the passive method, the rotation of the SP occurs in accordance with the calculation of the probable position of the Sun in the orbit (Figure 1) currently for a given area.
The active method is characterized by constant monitoring of the angle of incidence of sunlight on the solar panel. It should be 90ï?°. For this, tracker systems are used to track the position of the sun and orient the photocells. The work of the trackers is based on the analysis of the values of the photosensors that perceive the sun's rays at different angles and the submission of commands to control the operation of the engine to bring the position of the SP closer to the optimal placement.
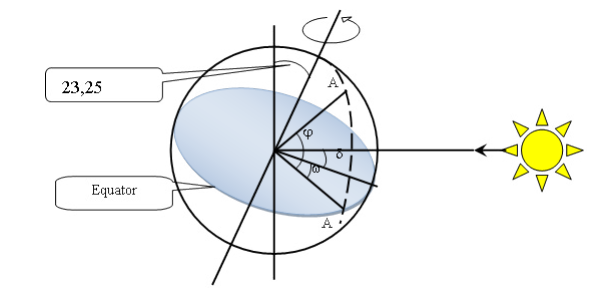
Figure 1: Characteristics of The Solar Orbit: δ – Angle of Inclination of The Sun; φ – The Width of The Installation Site;ω – Is the Hour Angle
The combination of passive and active methods allows you to reduce (ideally avoid) the disadvantages of each of them:
• for the passive method, it is the impossibility to take into account the operation of the system rotation mechanisms, errors in determining the initial key parameters (for example, the effect of height above sea level), different values for large areas of the solar station;
• for the active method, it is the influence of cloudy weather, fog, when there is diffuse lighting, which will not allow determining the optimal direction.
Position Controller for Solar Panels
The task solved by this development is to determine the most effective method of solar panel orientation. The purpose of the research is to develop an effective model of the interaction of solar radiation and photoreceiving modules, and a mathematical apparatus for calculating the angle of the SP position based on the current information of the tracker and accumulated statistical information on the angular movement of solar panels during the day and year. Currently, the ratio of the energy actually produced by solar panels to the design capacity (capacity utilization factor – CUF), which is declared by the manufacturer, is 18..35 % [1]. The combined control system allows you to increase and optimize this indicator when working in adverse conditions.
To implement this task, it is proposed to use a mosaic photoelectric sensor for monitoring the position on the Sun (active part) and a metaheuristic method for calculating the angle of rotation of solar panels taking into account statistical data of previous periods of operation of the solar power plant (passive part) in the trackers.
Cellular Tracker
Most modern tracking systems to calculate the rotation of the SP, they use an algorithm for sequential calculation of the difference in the values of the photosensors, the formation of control commands for the solar panel movement system using a stepper motor [2,3]. These systems use three or four channels of photo sensors (Figure 2).
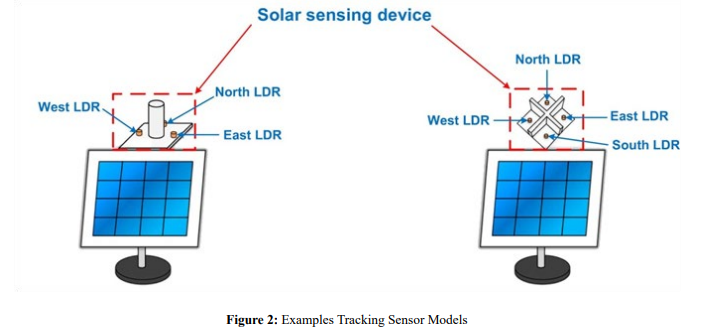
When the sun's rays arrive perpendicular to the plane of the panel, all the sensors are illuminated evenly and no rotation is required. If the angle of incidence is not perpendicular, the system tilts the solar panels towards the element that receives the greater flux. The tracker monitors the readings of the photo sensors and sends signals to the stepper motors according to these values. The corrective movement continues until the values on all channels are equal, until the "STOP" command is received. Such a device has the advantage of simplicity of design. However, if one of the elements is poorly lit, shaded or damaged, a false alarm is possible as a result of the SP deviating from its optimum position.
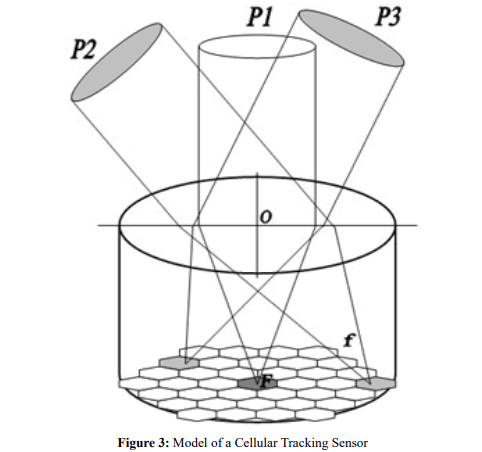
The proposed system uses a cellular tracker (Figure 3) in which the photosensor consists of hexagonal photocells arranged in a honeycomb pattern. Focused sunlight is detected by one or more nearby photocells "P2", "P3". The codes of the activated elements are sent to the control unit. On the basis of the accepted code, the direction and value of the angle of rotation of the plane of the solar panel with respect to the position perpendicular to the sun's rays are calculated. When the solar panel moves to the optimum SP position, it activates the other photoelements successively along the movement path until it reaches the central photoelement "P1", which is placed in the focus of the device. This allows the movement to be corrected in the event of faulty or shaded photocells. The activation of the central sensor is an additional signal to stop the rotation mechanism.
Statistical Data Calculation and Processing Block
The main functions of using the described tracker are the following:
• adjustment of the calculated (passive part) position of the photoreceiver modules;
• positioning of the system when calculation is impossible at the initial stage of operation;
• positioning of the system in the absence of statistical data on the position of the Sun at a given geographic point.
This calculation makes it possible to determine the optimal position of the solar panel according to the height of the area above sea level, the time of year and day, and the accumulated statistical data of the station's operation in previous periods [4].
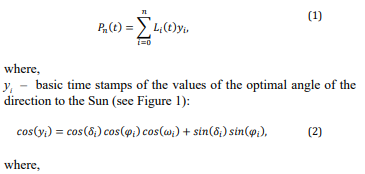
The calculation of the optimal position is based on the Lagrange interpolation polynomial:

Calculation of around points is based on the construction of confidence intervals, which is a problem at the initial stages of operation in the absence of previous indicators
When using zero-order methods, it is necessary to conduct a full- scale or numerical experiment, which was impossible before the construction of the SOLAR POWER PLANT.
If the objective function is approximated by a linear dependence, then first-order methods are appropriate. But the search for derivatives of the first order requires quite large amounts of memory, which is a problem for autonomous control systems. In the second-order methods, it is allowed to remove the linear approximation, but it is necessary to find the second-order derivatives and calculate the Hessian (Hk) at each step, which also requires additional memory and processor resources.
In order to bypass the listed problems, the use of metaheuristic algorithms is proposed. The advantage of these methods is the solution of the problem even when the interval of the optimal solution is unknown and there is a small amount of auxiliary information. This is achieved due to the fact that the information obtained during the calculation itself is used and stored in memory to control the next calculation. The most successful of these algorithms has proved to be "Iterated Local Search (ILS)", a method that provides an optimal or near-optimal solution [5]. The method that provides an optimal or near-optimal solution [5]. The main condition for the creation of a deterministic model in it and its use is the assumption that at the preparatory stage of problem construction the data on initial parameters and uncontrolled variables are absolutely accurate. We define such an operational research problem as a vector x(x1, x2, ..., xn), for which: approximation, but it is necessary to find the second-order derivatives and calculate the Hessian (Hk ) at each step, which also requires additional memory and processor resources. In order to bypass the listed problems, the use of metaheuristic algorithms is proposed. The advantage of these methods is the solution of the problem even when the interval of the optimal solution is unknown and there is a small amount of auxiliary information. This is achieved due to the fact that the information obtained during the calculation itself is used and stored in memory to control the next calculation. The most successful of these algorithms has proved to be "Iterated Local Search (ILS)", a method that provides an optimal or near-optimal solution [5]. The main condition for the creation of a deterministic model in it and its use is the assumption that at the preparatory stage of problem construction the data on initial parameters and uncontrolled variables are absolutely accurate. We define such an operational research problem as a vector x(x1 , x2 , ..., xn ), for which:
So, ILS performs a stochastic local search in the space of local optima. Let's consider the algorithm of its work. In the preliminary calculation, we generate the initial solution according to the geographical coordinates of the object of the solar power plant (see (2)).
In further calculations we use the accumulated statistical information on changes in the position of the solar panels. This means that the calculation of the optimal solution is based on past data in this period. The next step is to remove the system from the optimal zone. To do this, we use parameters determined by the external environment, so-called "uncontrolled variables". This is a "perturbation" process that is influenced by:
• the presence of a daily trend of the movement of the plane SP;
• information about the operation of the mechanisms;
• subsidence of the ground;
• Wind impact.
Next, new local optimums (LO) are calculated and compared with the previous optimum value. If in the new LO parameters are more optimal (energy generation is greater than in the previous period), then we replace the saved value
The calculation error for each of the variables is determined by the expression:
calculations.
There are several ways to stop the search for the optimal solution:
1. If the calculated and previous local optima are equal, then the optimal result is obtained
2. If a certain amount of research error is reached
3. If a certain number of iterations are performed (finding local optima)
For a more convenient analysis of the results, and in some cases even for a reduction of the calculation time, it is advisable to normalize the input data - to bring them into the range [-1, 1].
For xi samples in the interval [a, b] we have
The use of this metaheuristic method makes it possible to correctly calculate the change in the position of the solar panels, taking into account their location on the SPP field, the technological errors of the mechanisms and the operating coefficients of the driving elements.
In order to prevent damage to the equipment in unfavourable conditions, the system is designed to switch to the "shift mode" of operation (horizontal, vertical in the direction of the wind, at an angle to the horizon to remove snow or sand, etc.). At the end of this mode, as well as at the beginning of the daily start-up, the solar panels are positioned in the most favourable position for generation during this period of the day.
Conclusion
The considered task is relevant for the field of renewable energy - solar energy, as well as for the design and construction of "small", alternative home light-generating networks.
The described combined method allows you to calculate the position of each panel of the entire "field" of the solar power plant located on the selected site to obtain the maximum possible energy output.
The combined method of controlling the angle of inclination of solar panels allows:
• it is optimal to place them if there is no lighting, or it is very low, or at the wrong angle of rotation (during "shift mode" or technological operations);
• he received signal on the light sensor allows you to adjust the position of the SP taking into account scattered or reflected lighting to increase the generation power.
The developed device will make it possible to make maximum use of solar insolation on any day of the year and day, in accordance with the geographical position of the SOLAR POWER PLANT, the height of the location relative to sea level, and the topography of the area. The hardware-mathematical functionality used provides an opportunity to calculate the optimal placement of solar panels both under the condition of direct sunlight in order to maintain the most effective angle of incidence of the sun's rays on the light- receiving surface; as well as with scattered, diffuse or reflected lighting.
References
1. Wikipedia. Capacity factor, 2024.
2. Solar Tracking Systems: Maximizing Energy Production with Sun-Tracking Technology, By Energy Evolution Expo, 2024- 06-18.
3. "Sonya Solar" Ukraine, SONYAH BOX sun tracking system, 2024.
4. Semeniuk, A. (2024). Monitoring the Position of Solar Panels Using ILS Algorithms.
5. Lourenço, H. R., Martin, O. C., & Stützle, T. (2003). Iterated local search. In Handbook of metaheuristics (pp. 320-353). Boston, MA: Springer U